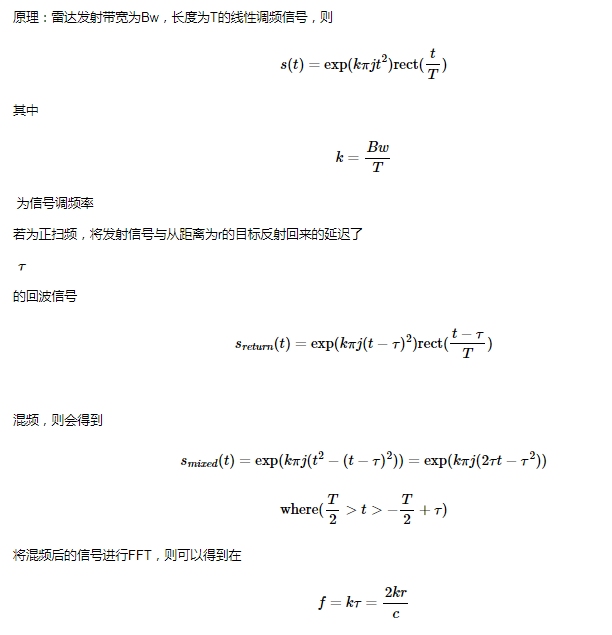
处的目标尖峰,通过与距离成正比的频率f则可求出目标距离r。
设计:
结构框图:
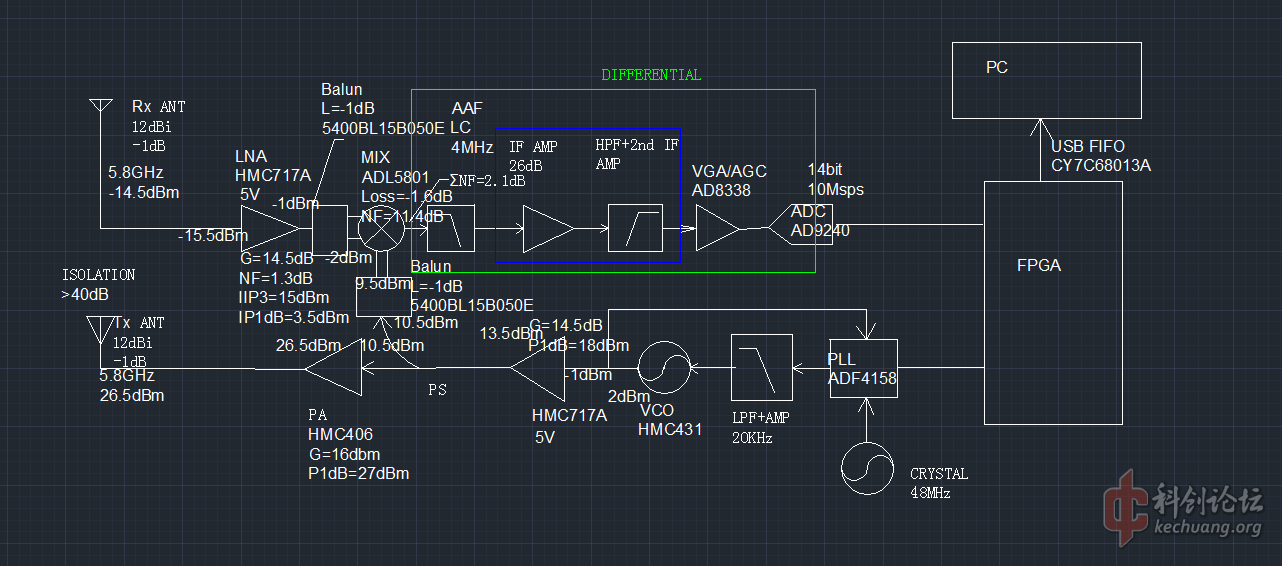 部分设计参考了http://hforsten.com/homemade-synthetic-aperture-radar.html,更换了射频放大和基带部分的设计以期实现更高的射频和动态性能。
部分设计参考了http://hforsten.com/homemade-synthetic-aperture-radar.html,更换了射频放大和基带部分的设计以期实现更高的射频和动态性能。
感谢@虎哥提供有关射频性能指标要求的指导。
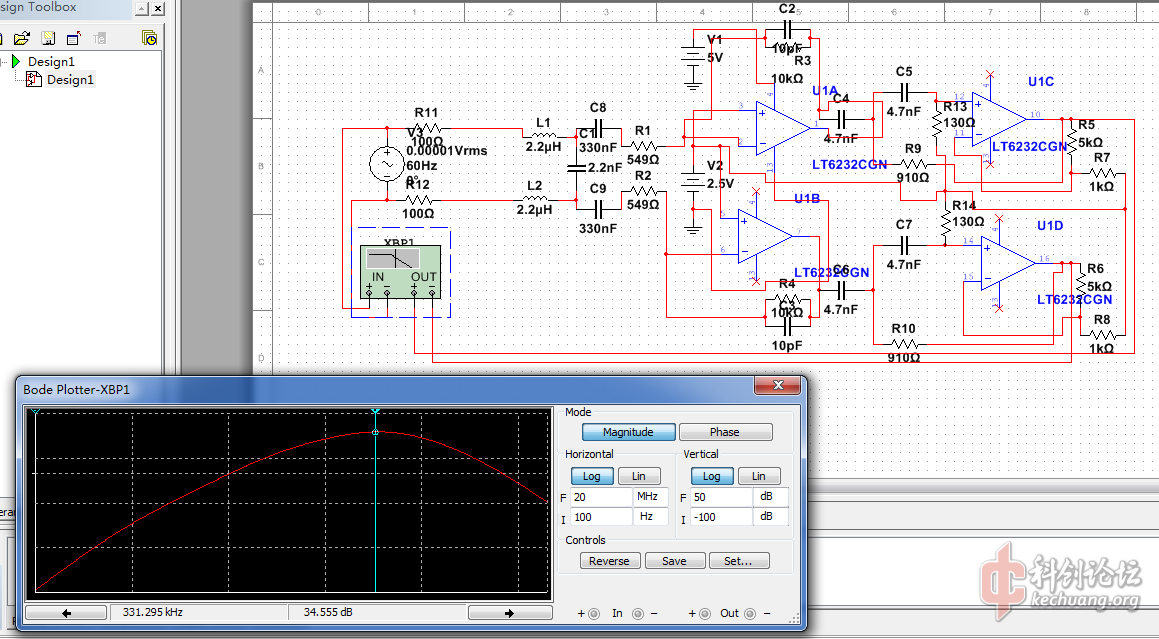
此设计通过PLL+VCO产生高线性度的LFMCW信号,混频后使用一个二阶的有源高通滤波器去除馈通,二阶巴特沃兹滤波器提供40dB/dec的滚降,正好能补偿雷达回波随距离的四次方衰减,降低后级信号处理电路的动态范围需求。
滤波器响应仿真:
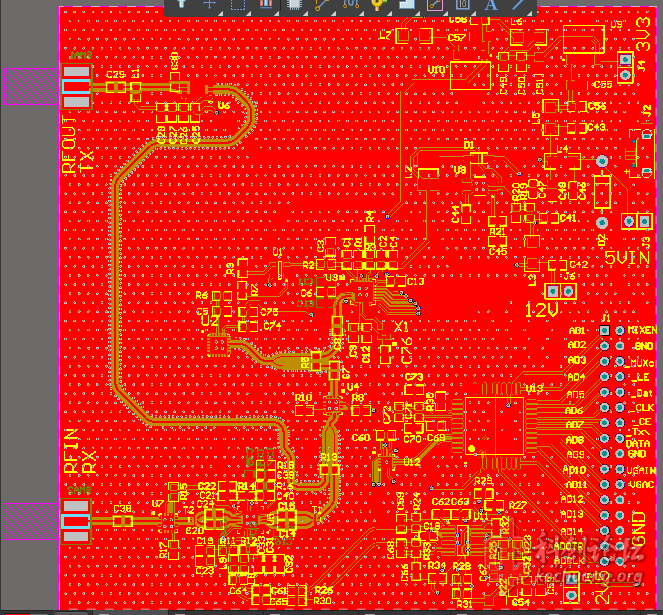
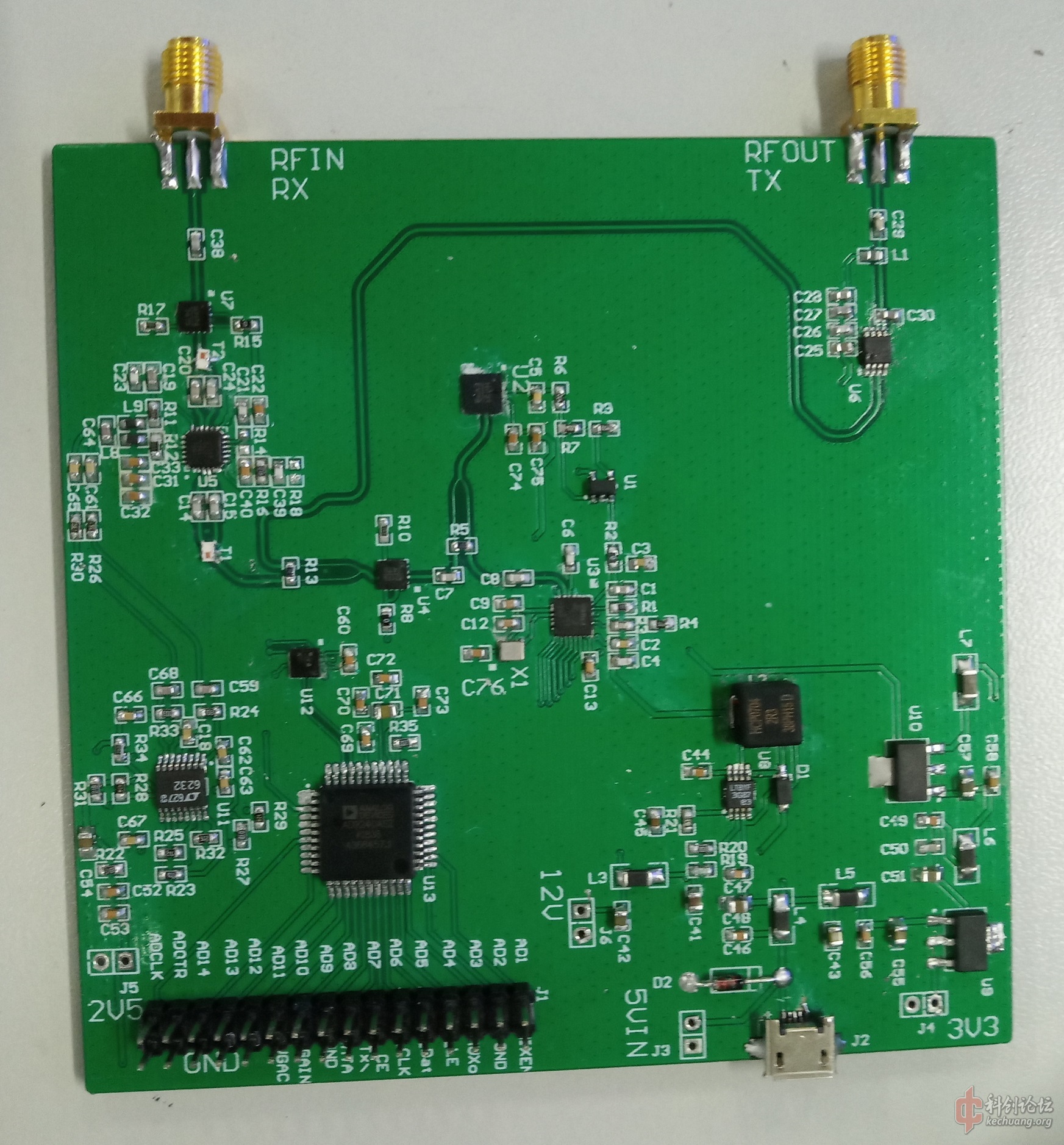
 PCB:
PCB:
 焊接完:
焊接完:
 使用一个带FX2 USB接口的FPGA开发板驱动并与PC连接。
使用一个带FX2 USB接口的FPGA开发板驱动并与PC连接。
DEBUG完成的样子:
 使用衰减器+同轴线直接连接收发端测试:
使用衰减器+同轴线直接连接收发端测试:
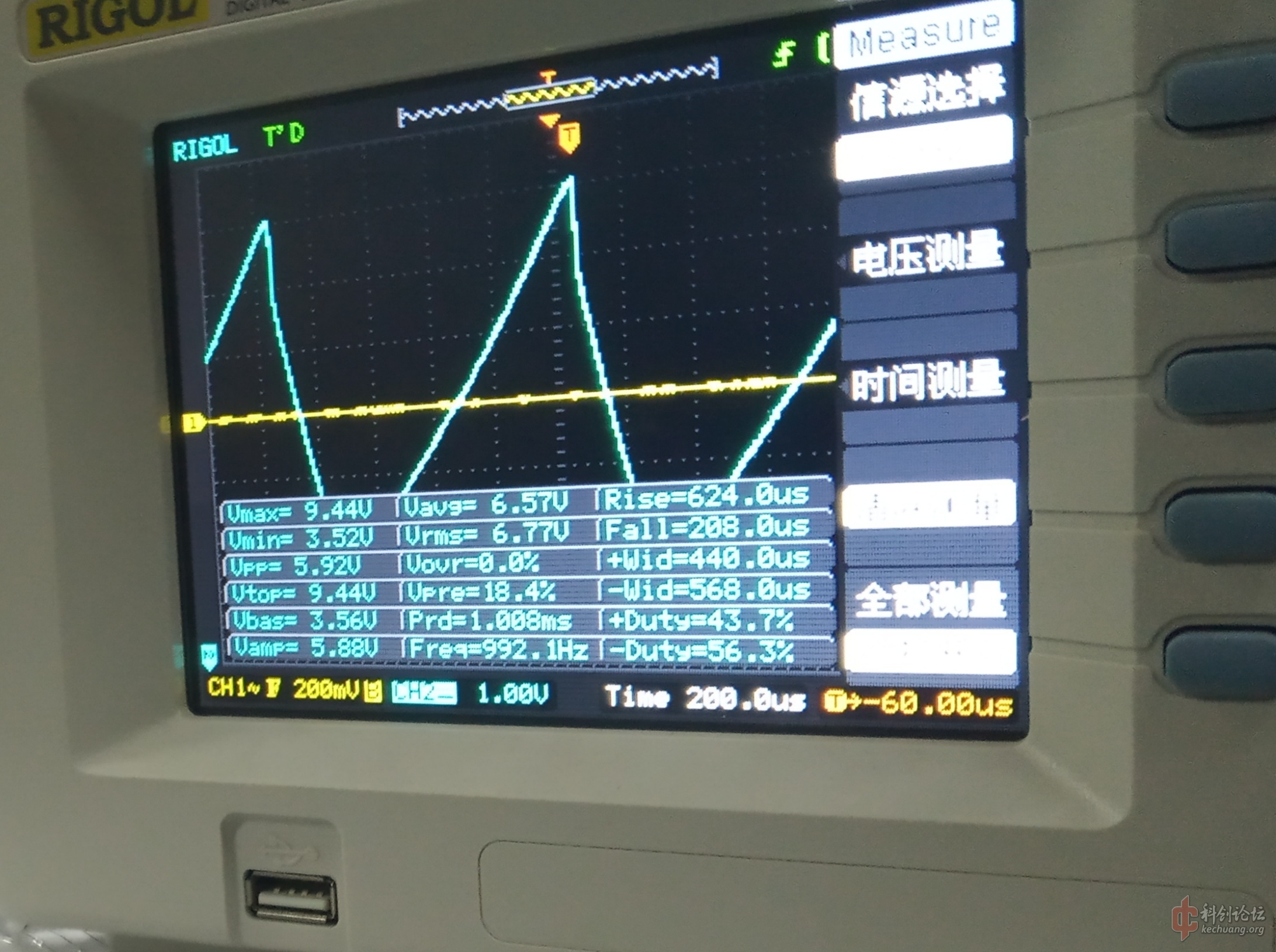
VCO输入:
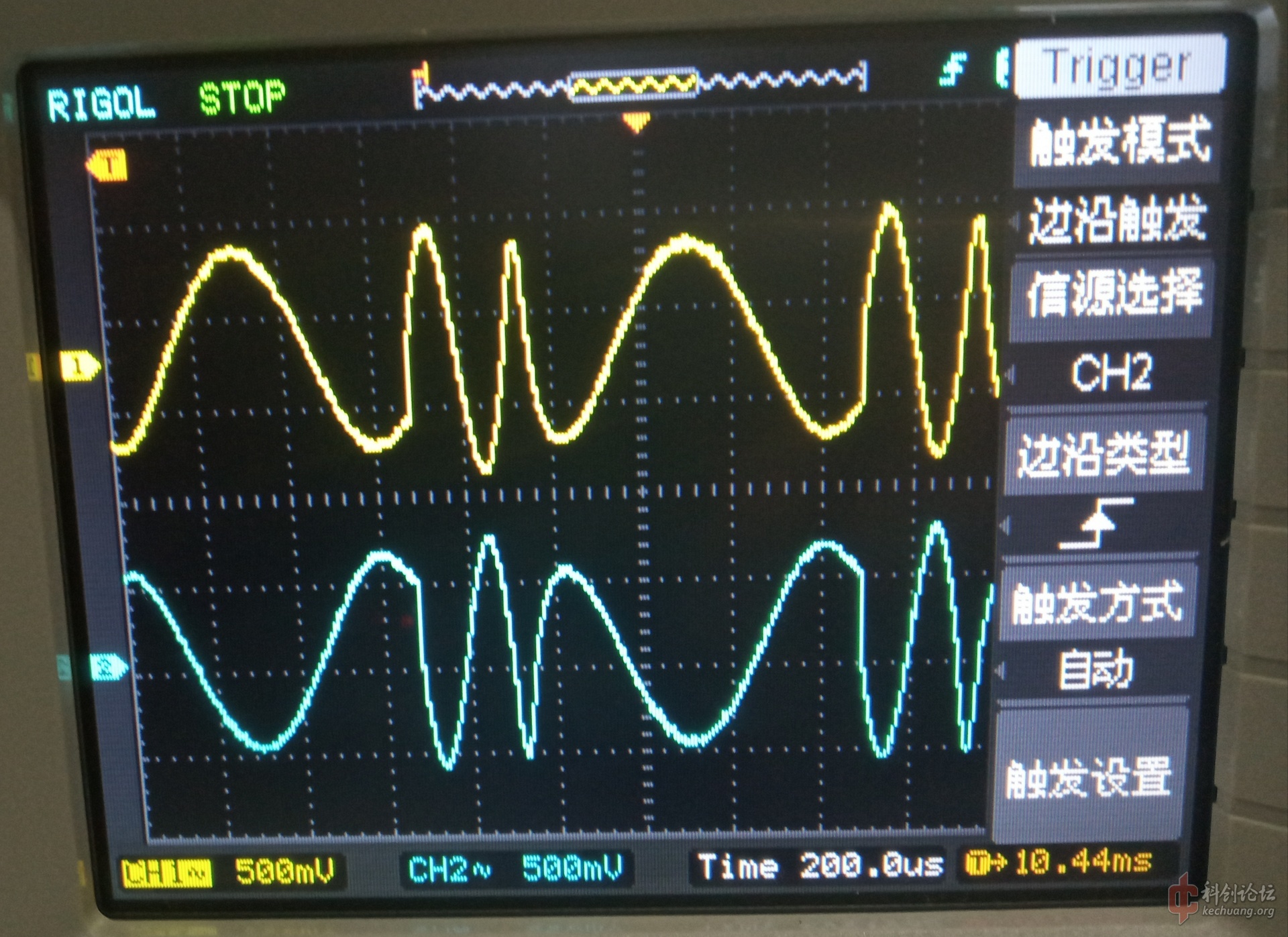
 混频器输出(经过第一级放大):
混频器输出(经过第一级放大):
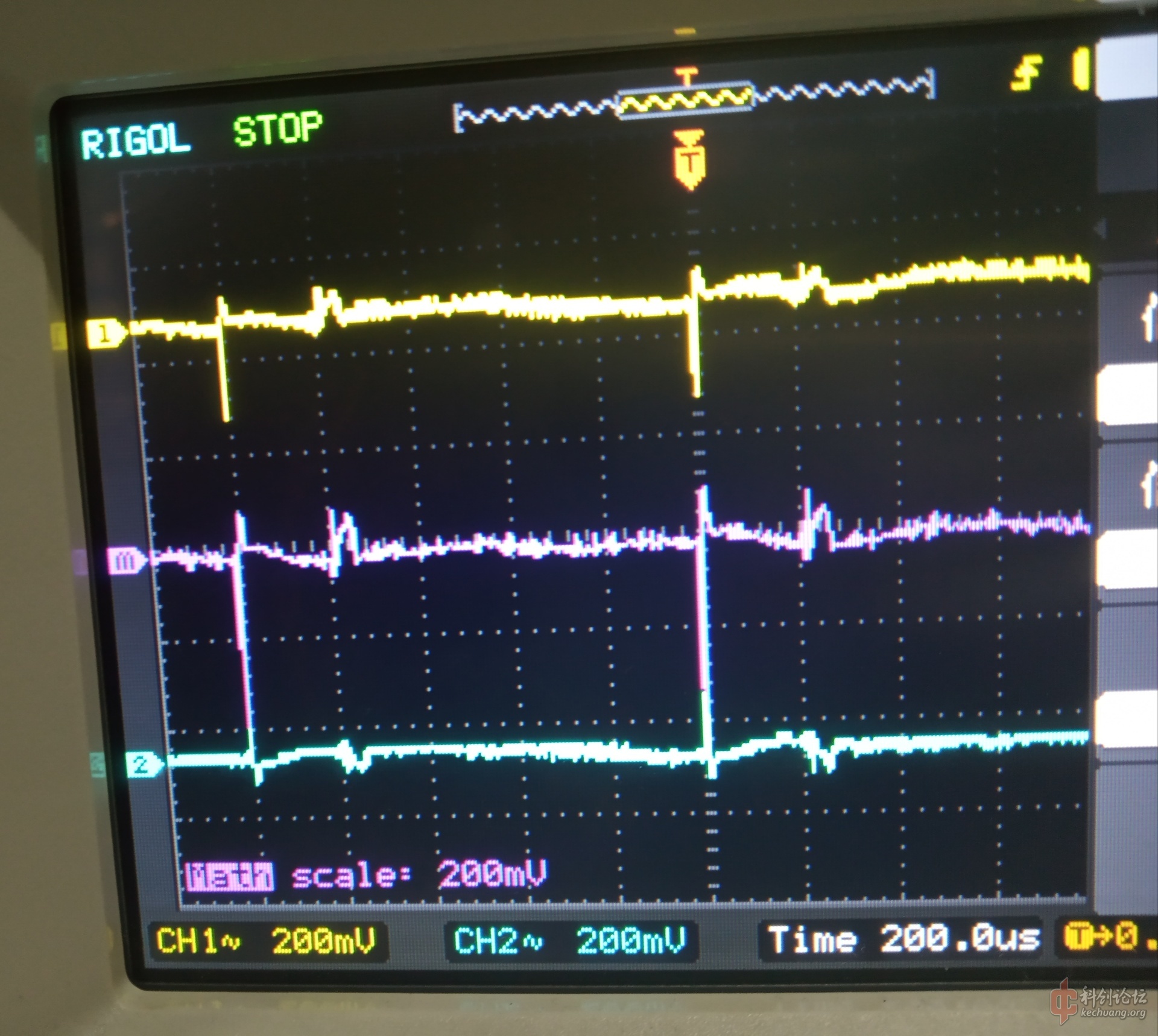
 经过高通滤波:
经过高通滤波:
 末级射频功放看起来很烫的样子。。
末级射频功放看起来很烫的样子。。
 实际测试:
实际测试:
测试场地:某马路边



可以明显看出移动的车辆(斜线),但场景中也有大量的静止反射体干扰,不容易看清。同时也可以看出车辆经过时对后方景物的遮掩效果。通过将多普勒频率接近零的回波成分过滤掉可以去除静止物体:


去除后:

 测试参数:中心频率5.8G,扫频带宽640MHz,有效带宽384MHz(去除扫频开始时PLL未锁定的一段),脉冲重复频率1kHz。基带采样率10Msps。
测试参数:中心频率5.8G,扫频带宽640MHz,有效带宽384MHz(去除扫频开始时PLL未锁定的一段),脉冲重复频率1kHz。基带采样率10Msps。
-----------------------------------------
设计资料与代码:https://github.com/gym487/FMCW_Radar/
-----------------------------------------
PS:DEBUG时曾使用过这种淘宝山寨天线
 距离超过5m就看不见。。
距离超过5m就看不见。。
上网一搜:https://www.maartenbaert.be/quadcopters/antennas/measurements/aomway-patch-ant005/
表面上这是个平板天线,其实是个全向的GP天线,真正的辐射体是馈线同轴电缆外皮。。。