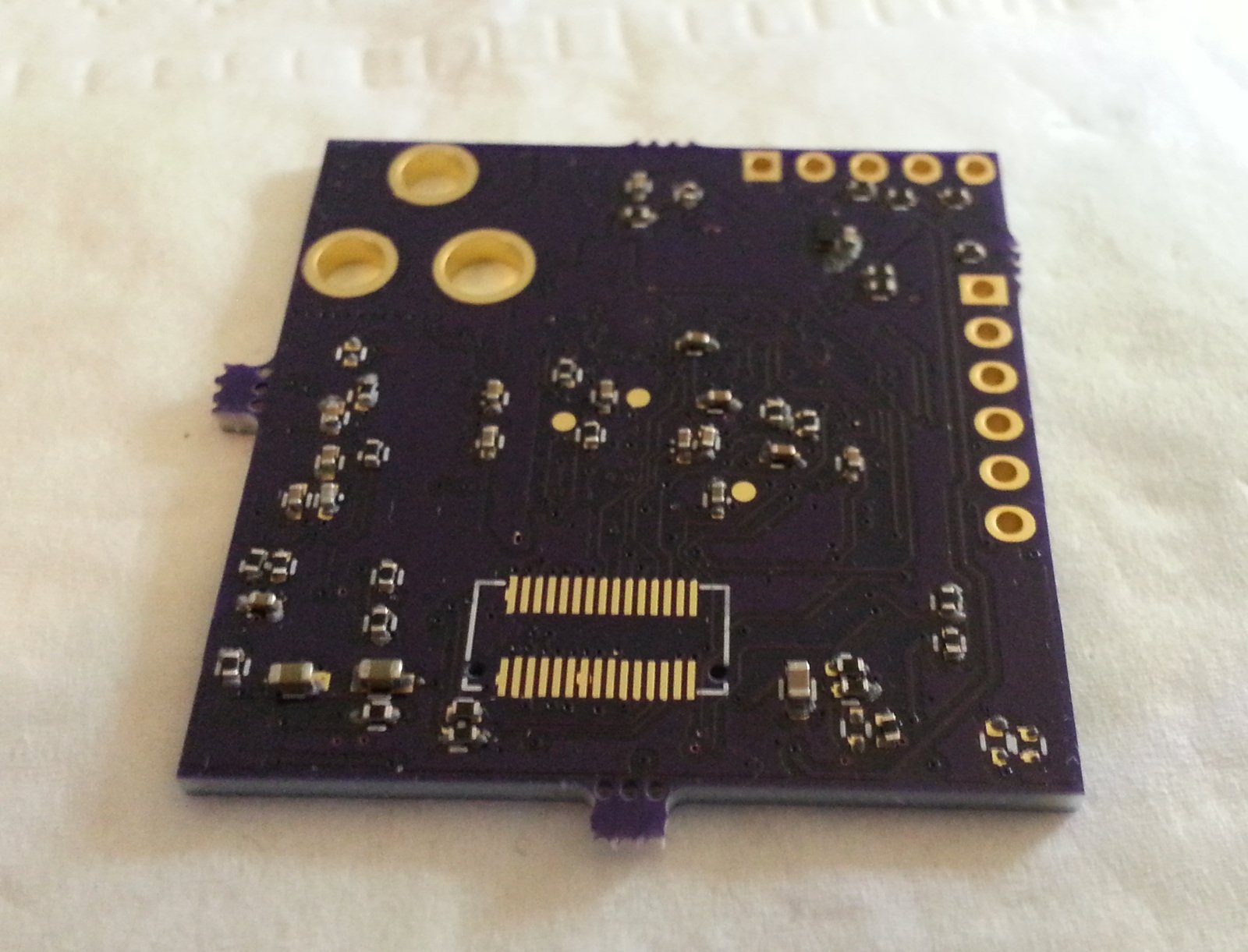
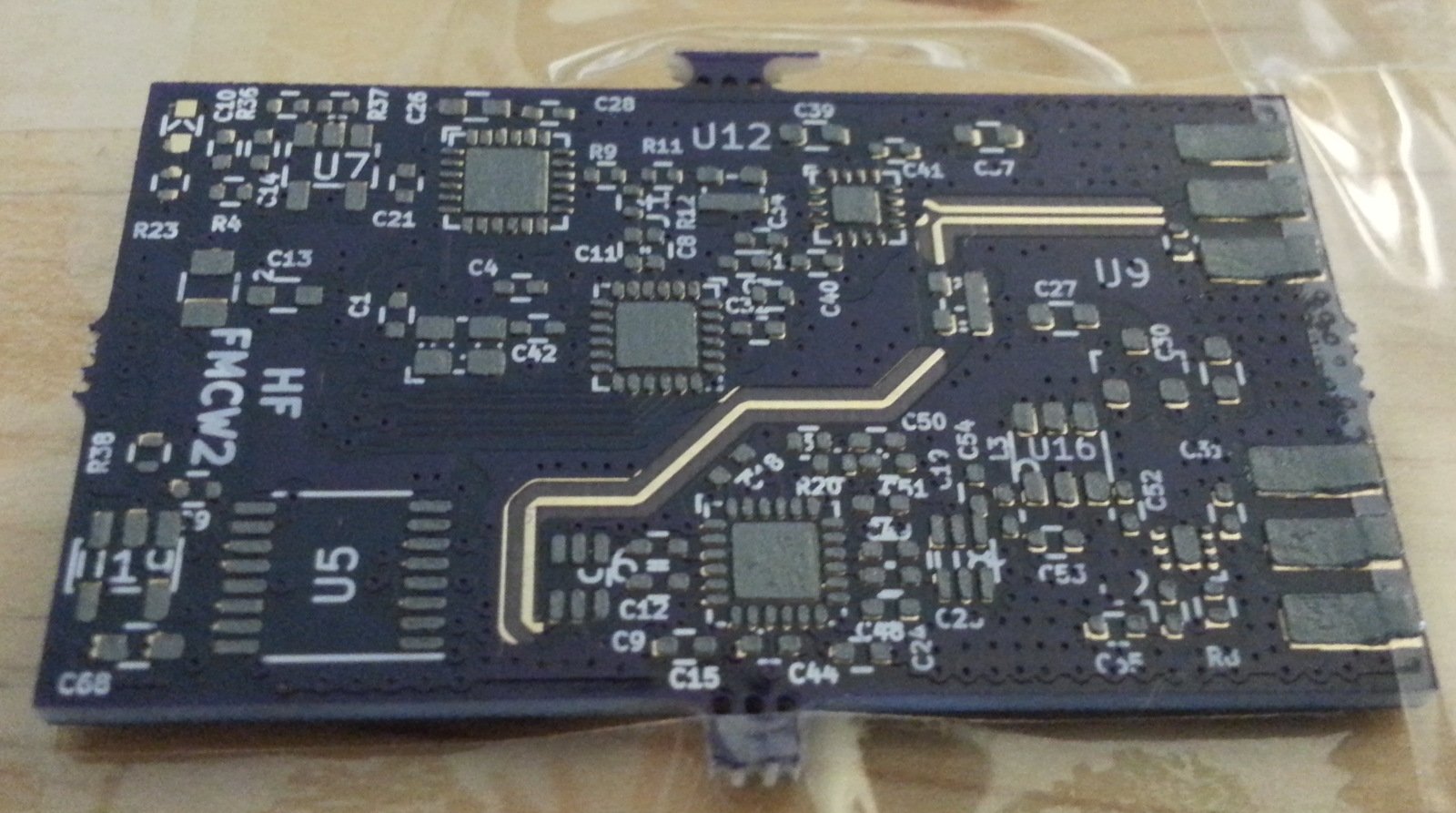
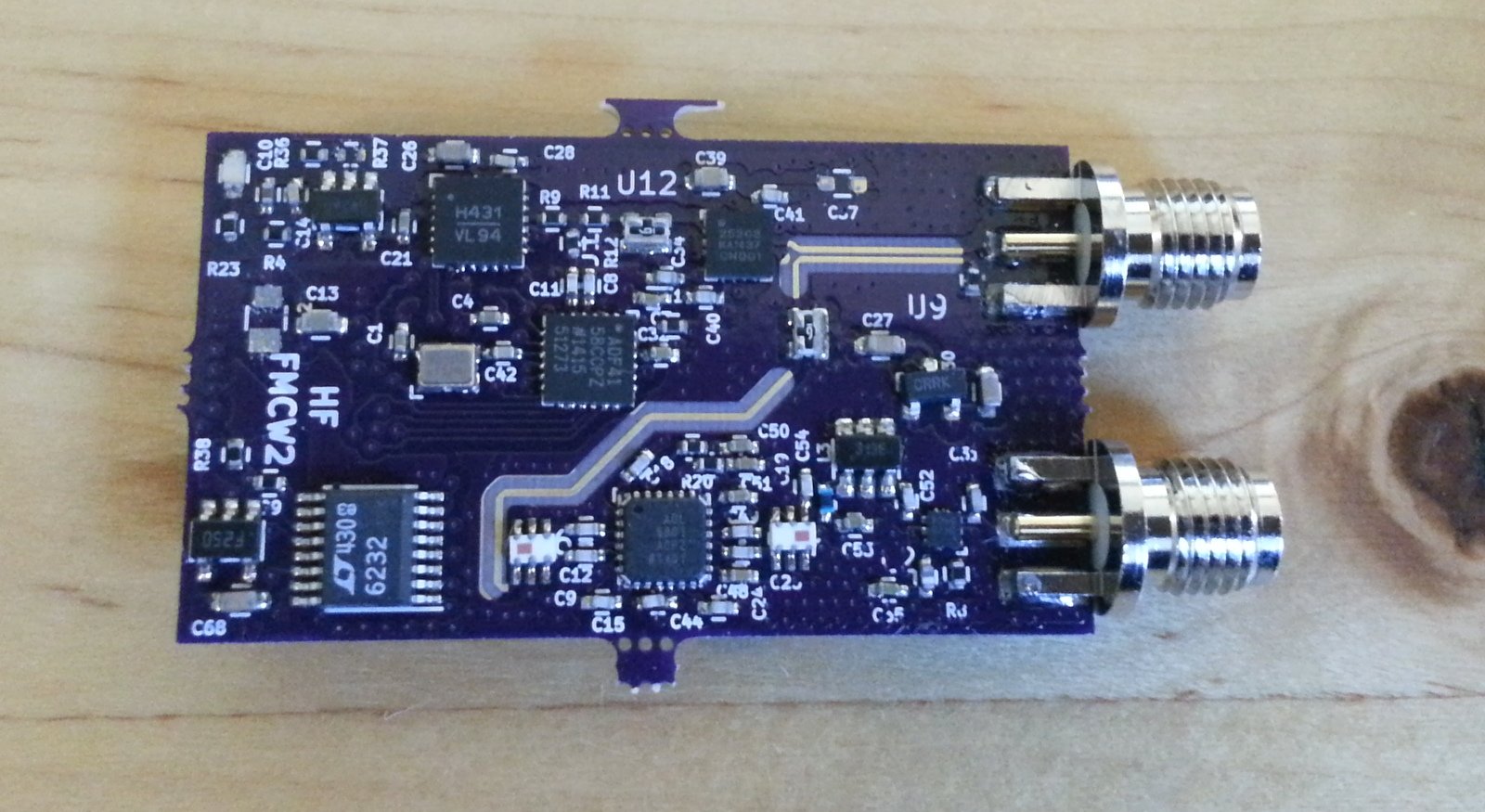
不带天线的成品雷达板。
介绍
以前我制作了一个非常简单的调频连续波(FMCW)雷达,能够探测到人体大小的物体,距离为100米。它工作正常,但由于它是以最小的预算制作的,因此有很大的改进空间。
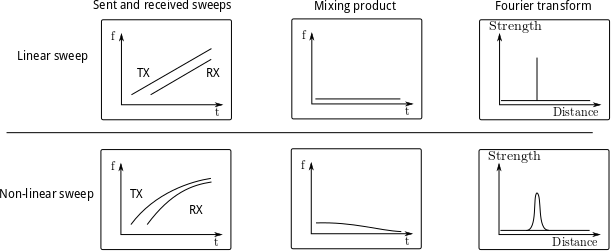
非线性频率扫描导致分辨率降低。
一个更大的问题是,产生高频输出信号的压控振荡器(VCO)直接由微控制器的数模转换器(DAC)驱动。VCO调谐电压和输出频率的关系不是线性的,使用线性斜坡作为调谐电压会产生轻微的非线性频率扫描。如果频率扫描不是线性的,它会在基带产生非恒定的混合音。FMCW雷达使用基带信号的傅立叶变换来寻找到目标的距离,并且当接收到的音调不恒定时,它在频域中扩展功率,并且目标分辨分辨率降低。
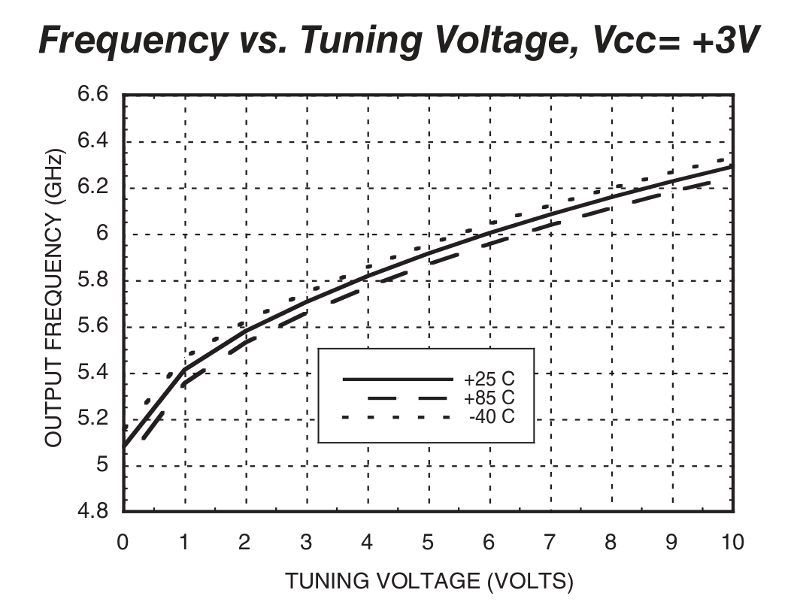
VCO的输出频率与调谐电压的函数关系。理想情况下,这将是线性的。
线性扫描可以通过预失真VCO调谐电压来产生,因此结果是线性扫描。这种方法的缺点是,它需要知道确切的VCO电压/频率特性,这些特性在某种程度上作为温度的函数而变化,并且随元件而变化。另一种方法是使用锁相环(PLL)使用分频器来测量产生的RF频率,并将其与精确的低频参考振荡器进行比较。然后,反馈环路调整VCO调谐电压,使得分频等于参考振荡器频率,这迫使RF信号频率为分频量乘以参考振荡器频率。以小的分数步长扫描分频器值可以产生非常线性的扫描。或者,可以在保持分频器恒定的同时扫描参考振荡器频率。
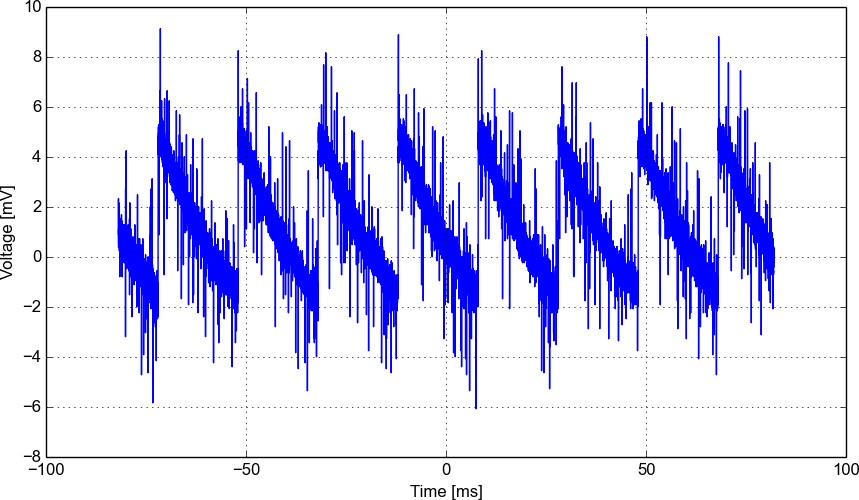
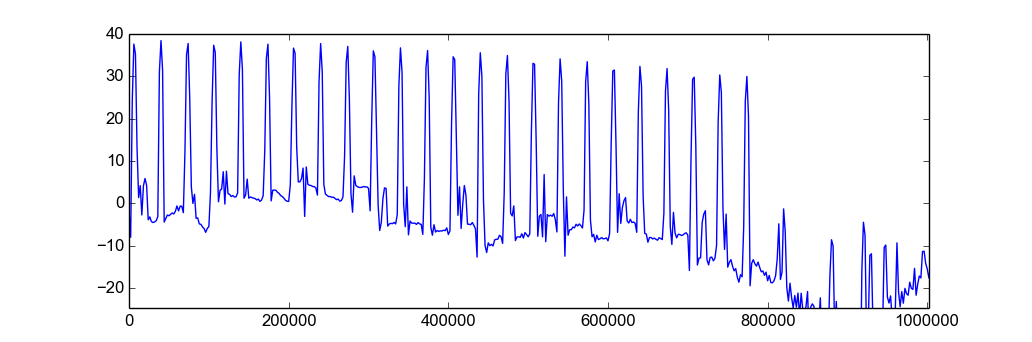
用负载替换天线时旧雷达的混频器输出。波形是由泄漏到混频器RF输入端口的LO引起的。
接收器也有一些问题。首先,基带低频放大器没有足够的增益来放大来自远处的低功率回波,从而限制了最大范围。接收器的另一个问题是DC混频产物在扫描过程中发生变化并产生交流信号。
接收机LNA的增益为13 dB,混频器的转换损耗为8.5 dB。这仅在RF部分留下4.5 dB的增益,并导致基带低频信号具有非常低的幅度。由于接收机是直接变频接收机,泄漏到混频器RF输入端口的LO振荡器将在DC产生混频产物。功率放大器输出功率和混频器转换增益随频率变化,导致DC偏移项也变化。它产生频率等于扫描重复频率的交流信号。该频率约为1 kHz,由基带放大器放大。由于RF增益较低,该泄漏信号的幅度可能比接收信号的幅度更大,从而使基带放大器饱和。可以使用隔离更好的混频器、增益变化更小的PA、更高的RF增益以及混频器后的高通滤波器来最小化这种影响。
最后一个问题是微控制器。通过USB将所有ADC样本传输到PC的速度不够快。它每秒只能传送25次扫描,而雷达每秒可以传送500次扫描。或许有可能改进固件,但产生VCO斜坡信号的严格时序限制会使其变得困难。
由于旧设计的各种问题,我决定做一个新的雷达来解决这些问题。
新型雷达
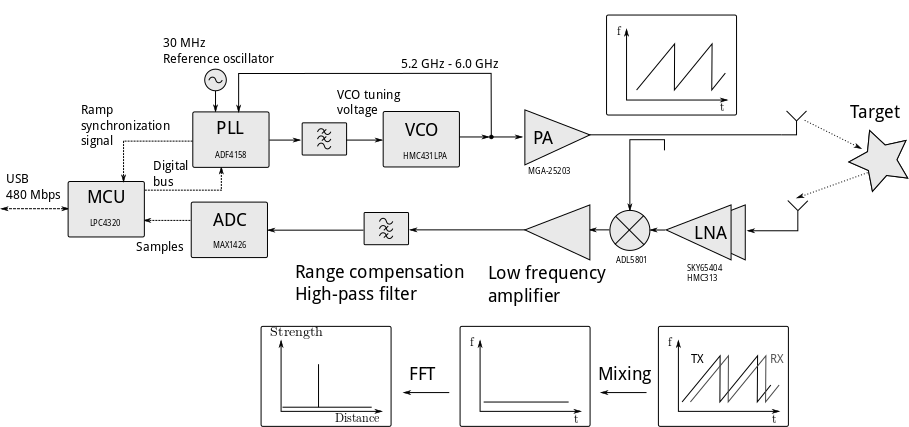
新设计的框图。
新的雷达设计在系统层面上与旧的非常相似,但改进很少。它使用相同的原理工作:发射的线性扫描从目标反射并在接收器接收。在那里,它与传输扫描的副本相乘。由于电磁辐射以光速传播,所以接收到的反射和传输的扫描之间存在时间差。混频器中的乘法产生低频信号,其频率与信号的传播时间成比例。对混频器输出信号进行傅里叶变换可以给出信号中的频率,并可用于同时分辨多个目标。
最大的区别是增加了PLL,使发射扫描线性化。使用的PLL为ADF4158它是专门为雷达设计的,可以通过编程产生精确的锯齿和三角斜坡。
其他变化包括:更快的微控制器,更好的接收器,更好的基带滤波和其他各种小的改进。
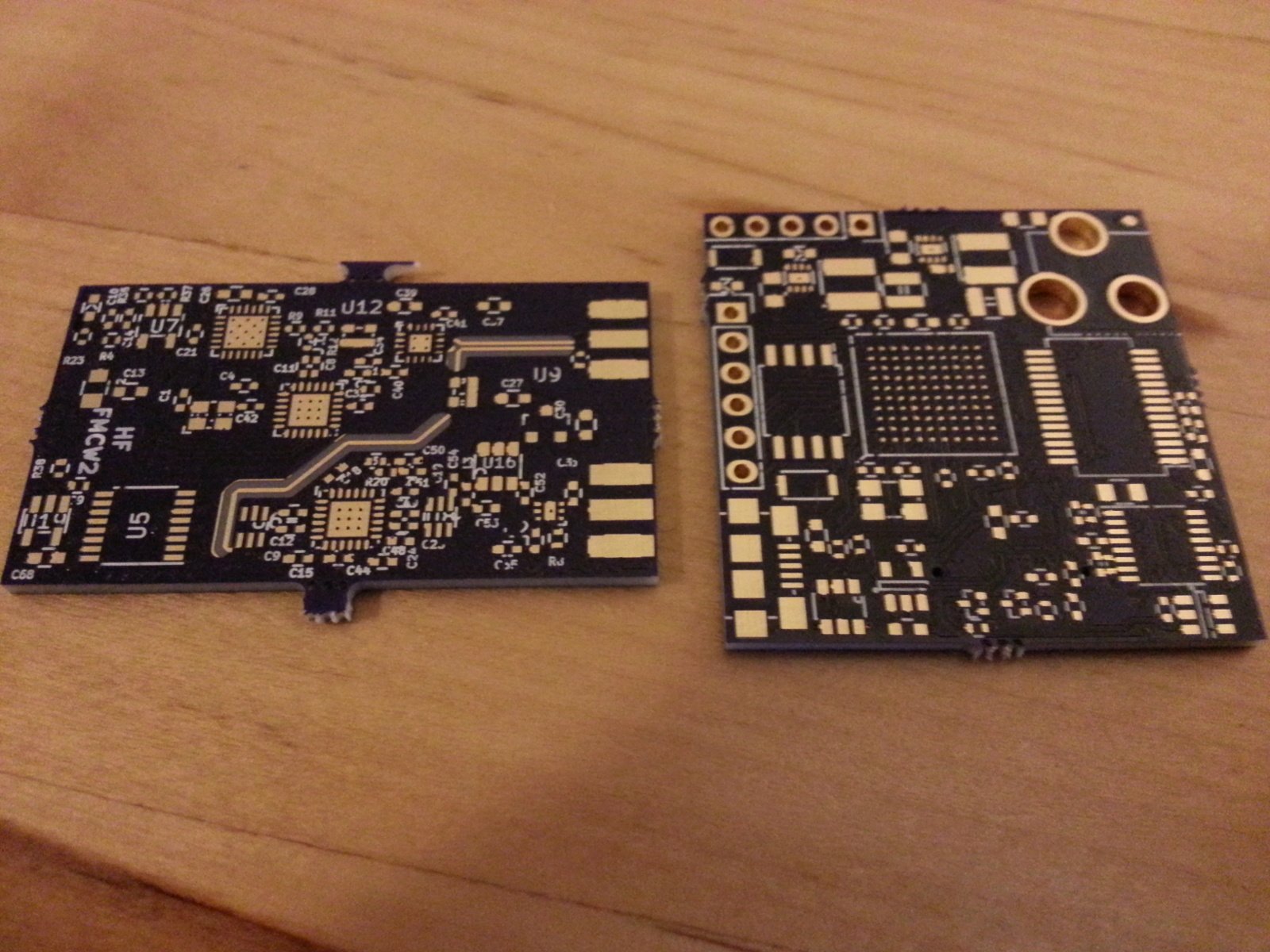
裸露的PCB。
设计是把它分成两块板。一个有数字功能和其他高频部分。其中一个原因是,如果我在PCB上犯了一个错误,采用双板设计,我可能只能订购一个新板,这样可以省钱。两块板还能降低从数字板到RF板的噪声。
RF板需要四层,因为50欧姆传输线在两层板上太宽,因为基板更厚。四层板也由损耗更低、参数更稳定的更好材料制成。数字板可以制成两层以节省资金,因为对于相同的面积,四层板的成本是两层板的两倍。
但结果是两层板需要更大,因为紧凑型BGA元件不能在两层板上布线,并且需要更大的QFP封装微控制器。QFP占用的面积是BGA的四倍多,因此在四层板上使用BGA成本更低。由于有更多的可用层,它还能够使其他元件封装得更紧密,从而实现干扰更少的更好布线。
数字板
首先,我想用FPGA进行信号处理,但它们价格昂贵,而且没有简单廉价的方法来添加高速USB通信。我最终使用了恩智浦LPC4320204 MHz ARM微控制器。它有一个有趣的串行GPIO (SGPIO)器件,有几个移位寄存器,可以进行非常广泛的配置。SGPIO可用于实现UART和SPI等通信协议,产生PWM信号,与并行输出ADC接口(我用它来做其他各种事情)。SGPIO子系统的时钟频率最高可达102 MHz,允许从ADC进行非常快速的数据传输。微控制器还有高速(480 Mbit/s) USB,所以这次传输速率应该不成问题。它也是最便宜的高速USB微控制器之一,在Digi-Key的小批量生产中价格为7.2 €。
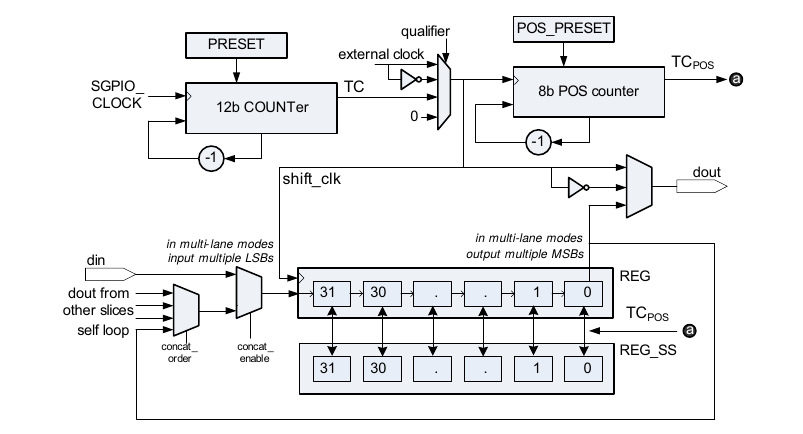
SGPIO切片框图。一个片可以配置为输入或输出,产生中断,也可以配置时钟源。切片也可以输出到其他切片。
HackRF出于相同的原因使用相同的微控制器。由于HackRF是开源的,我可以使用它的软件,只需稍加修改。现有的软件真的很有帮助,尤其是因为我没有调试连接器,很难看到微控制器在做什么。
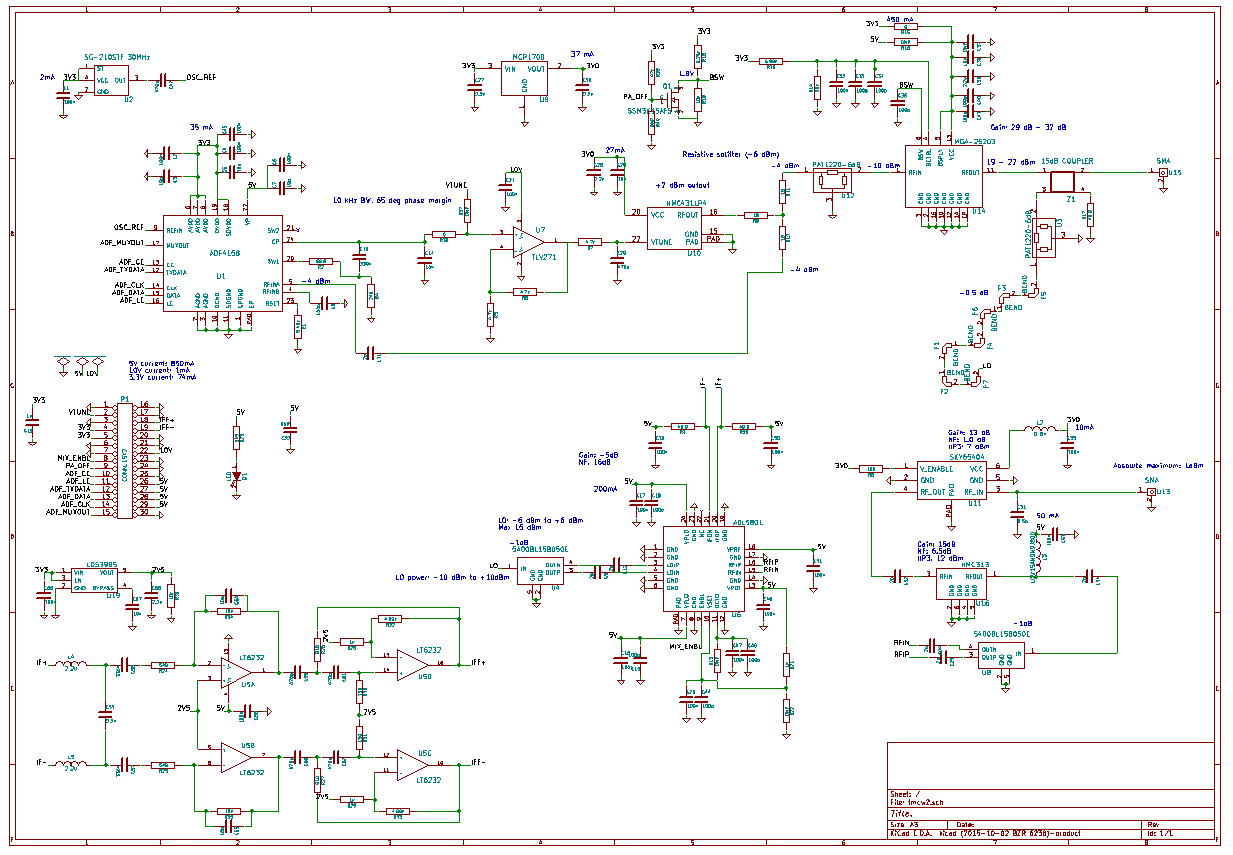
射频板
RF板基于ADF4158PLL芯片。它将VCO的30 MHz参考时钟和RF输出作为输入。VCO输出频率由芯片上的可编程分频器分频,分频后的频率与参考时钟进行比较。然后,芯片输出模拟电压到VCO的调谐引脚,使分频后的RF频率等于参考时钟。由于低频参考时钟和分频器可以做得非常精确和稳定,PLL芯片使得VCO输出频率也非常精确。
这种芯片是专门为雷达应用制造的。其分频值可以是小数,因此RF频率的步进可以小于参考时钟频率的倍数。它还具有内部功能,可以自动步进分频器值,从而产生适合雷达的线性扫描,而无需微控制器的持续控制。
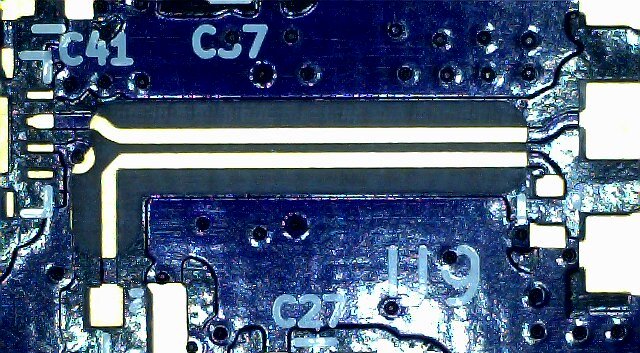
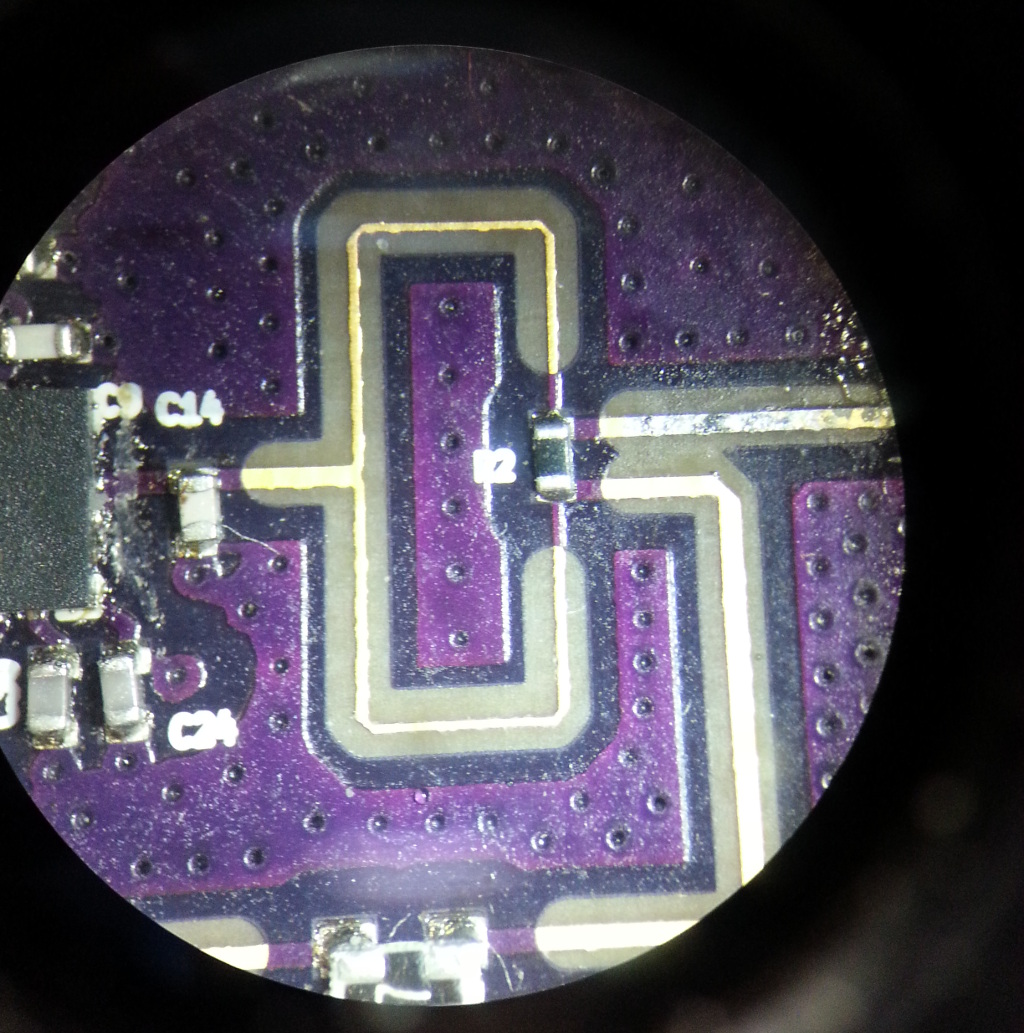
混频器LO耦合器。功率放大器输出的一小部分是耦合器到混频器。右侧的小尺寸用于端接耦合器另一支路的50欧姆电阻。
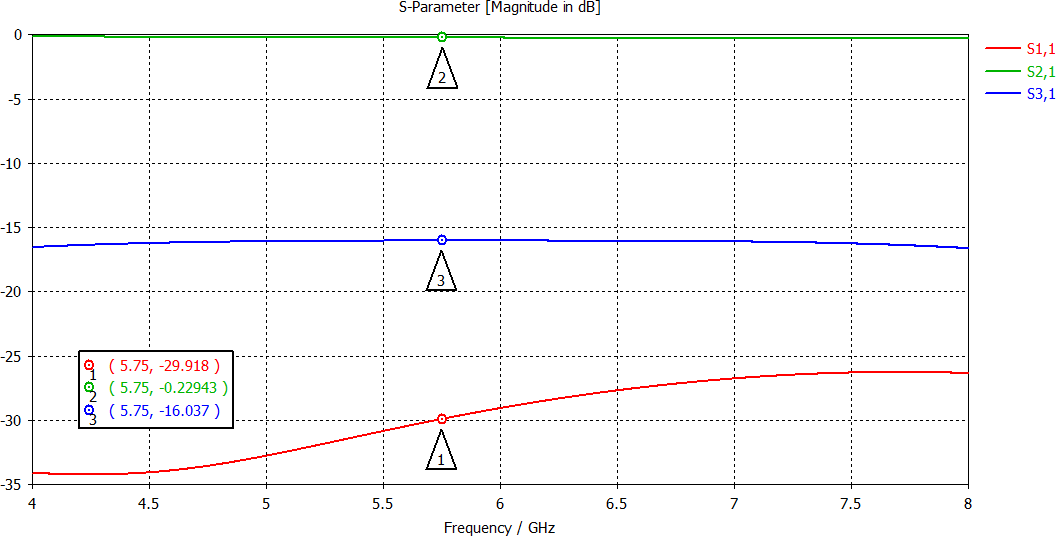
耦合器模拟S参数。S11 =来自PA的输入,S31 =到混频器的耦合器功率,S21 =传递到天线的功率。
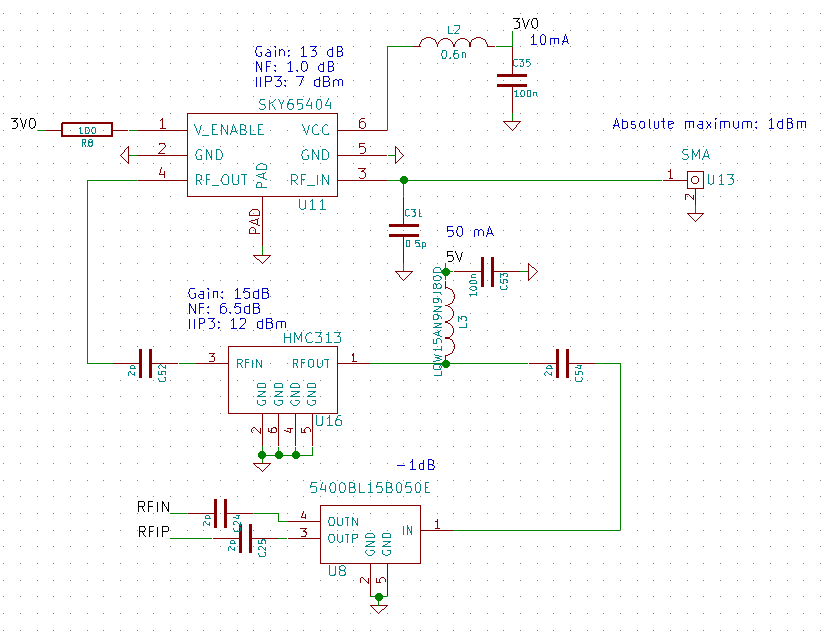
以前的雷达使用无源混频器,对本地振荡器的功率要求很高。威尔金森分频器之后,PA用于将输出功率平均分配给天线和混频器。混频器不需要那么多功率,这导致效率降低,辐射功率降低。
新耦合器耦合到混频器的功率要少得多(-16 dB = 3%),更多的功率被传递到天线。从功率放大器到天线连接器的模拟功率损耗仅为0.23 dB (5%)。
使用切掉部分拐角的90度急弯的原因是这些拐角被设计成最小化弯曲的反射。这种角被称为斜接弯管。也可以使用大直径的平滑弯管,但是它们需要更多的空间。斜接弯管也用于长迹线混频器本地振荡器输入。
低噪声放大器。接收天线SMA-连接器在右上角,巴伦和混频器输入在底部。
这一次,在LNA之后有额外的放大器来增加混频器之前的增益。我使用的有源混频器噪声系数较高,需要比之前的无源混频器更高的增益,才能实现低系统噪声系数。系统的噪声系数可通过下式计算弗里斯公式。如果只使用第一个LNA,系统的噪声系数将是6 dB。两个lna的噪声系数为2 dB。
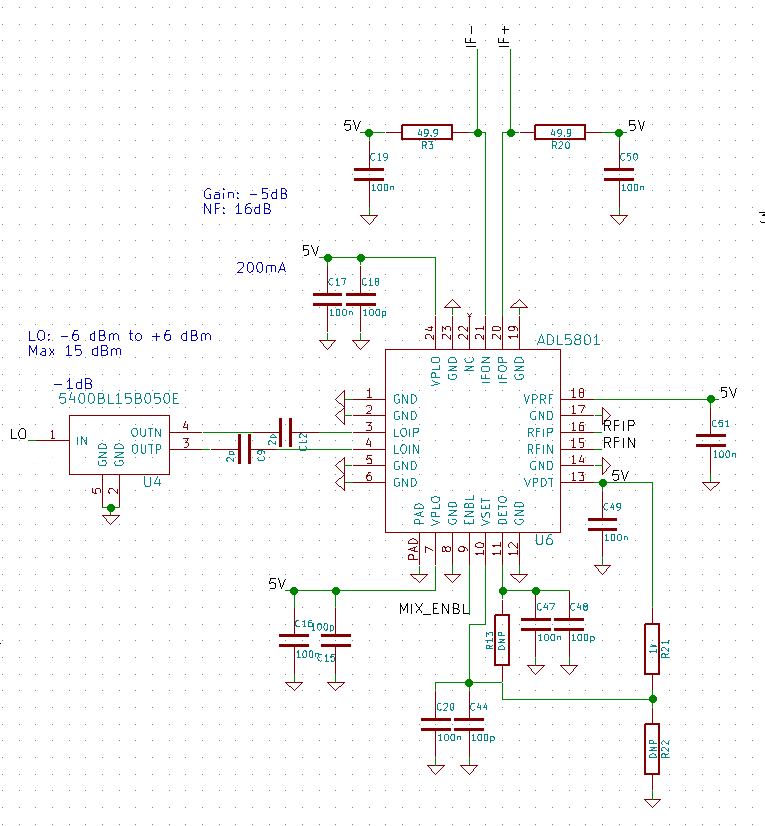
ADL5801有源混频器
与上次具有高LO功率要求的无源混频器不同,这次混频器是有源的。它需要更少的LO功率,这使得使用耦合器代替功率分配器成为可能。转换增益也更大,从而提高了基带的输出信号电平。LO和RF端口之间更好的隔离也能减少DC偏移项。
当下变频到低频时,使用有源混频器的缺点可能更大闪烁噪声与无源混频器相比,需要更多的晶体管。在较低频率下,晶体管产生的噪声比在高频下大得多,并且在低于某个工艺相关转折频率时,这种噪声表现为当频率降低时1/f急剧增加。MOSFET晶体管通常具有高得多的转折频率,在小型集成晶体管的情况下有时为几兆赫。双极晶体管通常表现更好,它们的转折频率通常只有几千赫兹。如果混频器采用MOSFETs制成,则可能具有较高的1/f噪声,导致噪声系数计算实际上要高得多。我用的混频器是用SiGe工艺制造的,它使用双极晶体管。在数据手册中,它没有低频噪声特性,但它可能具有足够低的转折频率,在这种应用中无关紧要,因为基带信号频率约为10 kHz至1 MHz。
距离补偿高通滤波器
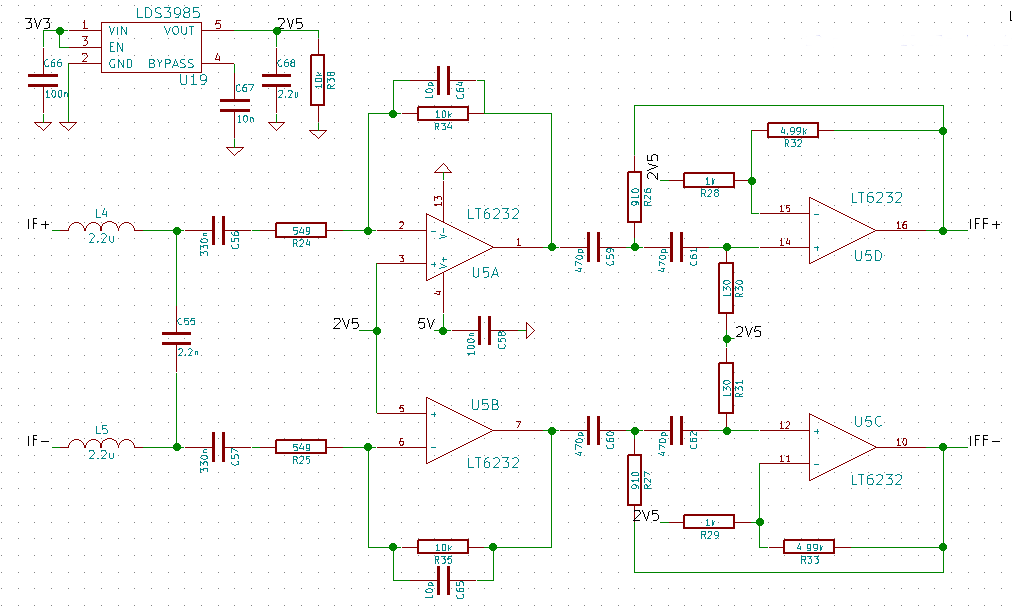
基带滤波器原理图如果是混频器的输出,IFF是ADC驱动器的输入。
雷达接收到的功率随着距离的四次方减小。这导致了各种问题,例如使最大检测距离加倍需要16倍以上的传输功率。当有几个相距很远目标时,会出现其他问题。靠近雷达的目标比远处的目标反射更多的能量。四次方是指当目标远10倍时,接收到的功率小一万倍。真实的硬件具有有限的动态范围,使得具有更强回波信号的近目标可能掩盖来自更远目标的弱信号。
因为FMCW雷达中目标的频率与目标的距离成线性关系,所以可以使用高通滤波器来均衡来自相距很远的目标的信号。如果混频器后的信号使用40 dB/decade高通滤波器滤波,来自不同距离的相同大小目标的响应将理想地具有相同的幅度。
在上面的原理图中,40 db/decade高通滤波器实现了范围补偿。第一级是LC低通滤波器,在第一放大级之前滤除高频噪声。在用于消除DC偏移的交流耦合电容之后,是第一个放大级,在进一步处理之前放大信号。下一级是二阶Sallen key高通滤波器,产生40dB/十倍频程斜率。然后,输出进入数字板,该板具有可变增益级和ADC驱动器。
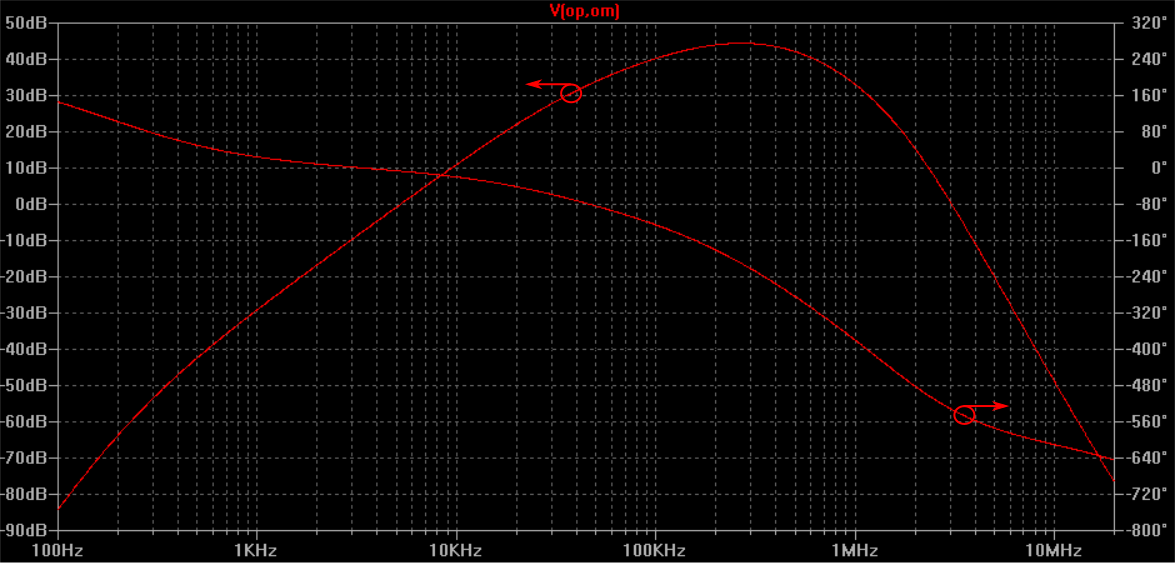
基带滤波器频率响应。
这种方法的缺点是,在低频时,基带增益低得多,甚至会衰减信号。RF噪声在所有频率下仍然相同,因此低基带增益会降低低频时的动态范围。最后,这并不重要,因为在低频时,由于接收功率较高,动态范围已经很高了。
下面是模拟的同一个场景,有和没有范围补偿过滤器,显示了它可以有多大的影响。
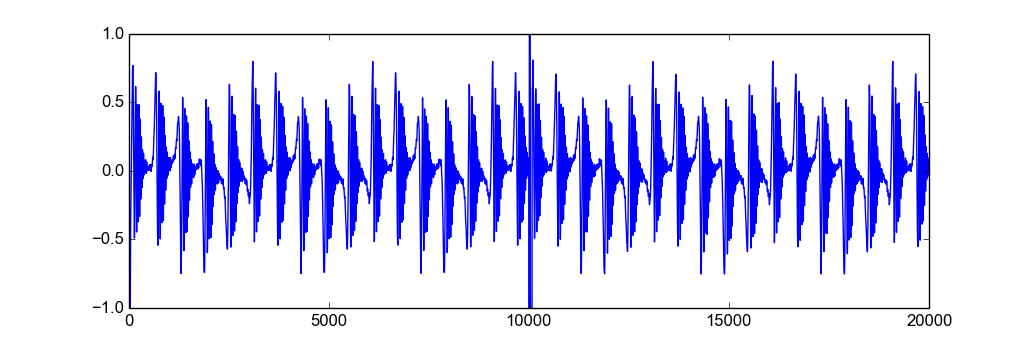
从不同距离的几个相同大小的目标经过混频器后的模拟接收信号。
接收信号的FFT。非常靠近雷达的目标反射的能量要大得多,以至于看不到远处的目标。x轴是以赫兹为单位的频率。
范围补偿滤波器后的相同信号。
滤波信号的FFT。更远的目标现在也可见了。
焊接数字板
背面只有很少的无源元件,并且是手工焊接的。
首先焊接背面。它只有轻的成分,即使在顶面回流期间颠倒过来,也通过焊料的表面张力保持在适当的位置。板对板连接器是在顶部完成后焊接的,它很高,会抬高电路板,使得在顶部应用焊膏更困难。
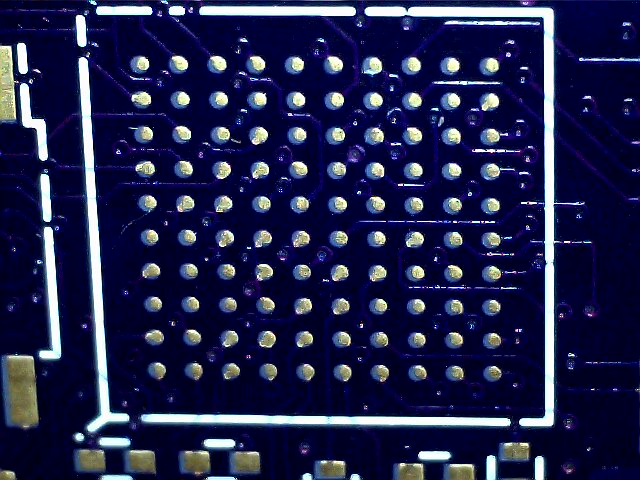
100球BGA封装。阻焊膜稍微偏置。

使用模板涂抹焊膏。
回流前的BGA特写。
我设法将BGA非常完美地放置到位,可能有大约0.1毫米的定位误差,但焊料的表面张力可以纠正它。即使更大的定位误差也没问题,只要球不桥接焊膏滴。
焊网上BGA的轮廓对其定位非常有用。如果电路板上没有任何可见的导轨,定位将非常困难,因为焊盘位于芯片下方。
回流后。
回流焊后,焊点看起来很好。看起来BGA上的焊球也回流并与PCB上的焊膏结合。如果只有焊球保持固态的锡膏回流,一切都可能工作一段时间,但是焊球和少量回流的锡膏之间的接触不太可靠。

回流后。
左边的芯片是固件的闪存,中间是微控制器,右边是ADC,下面是驱动它的运算放大器。左下角未安装的组件是USB电源开关,用于USB移动设备。我决定不考虑它,因为它可以从微控制器切换。如果在连接到计算机时启用它,它会将板上的5V电源短路到计算机的USB电源线,这就是为什么在其他一切正常之前最好不要使用它。
两个非常小的表面贴装开关是复位按钮和USB启动按钮。
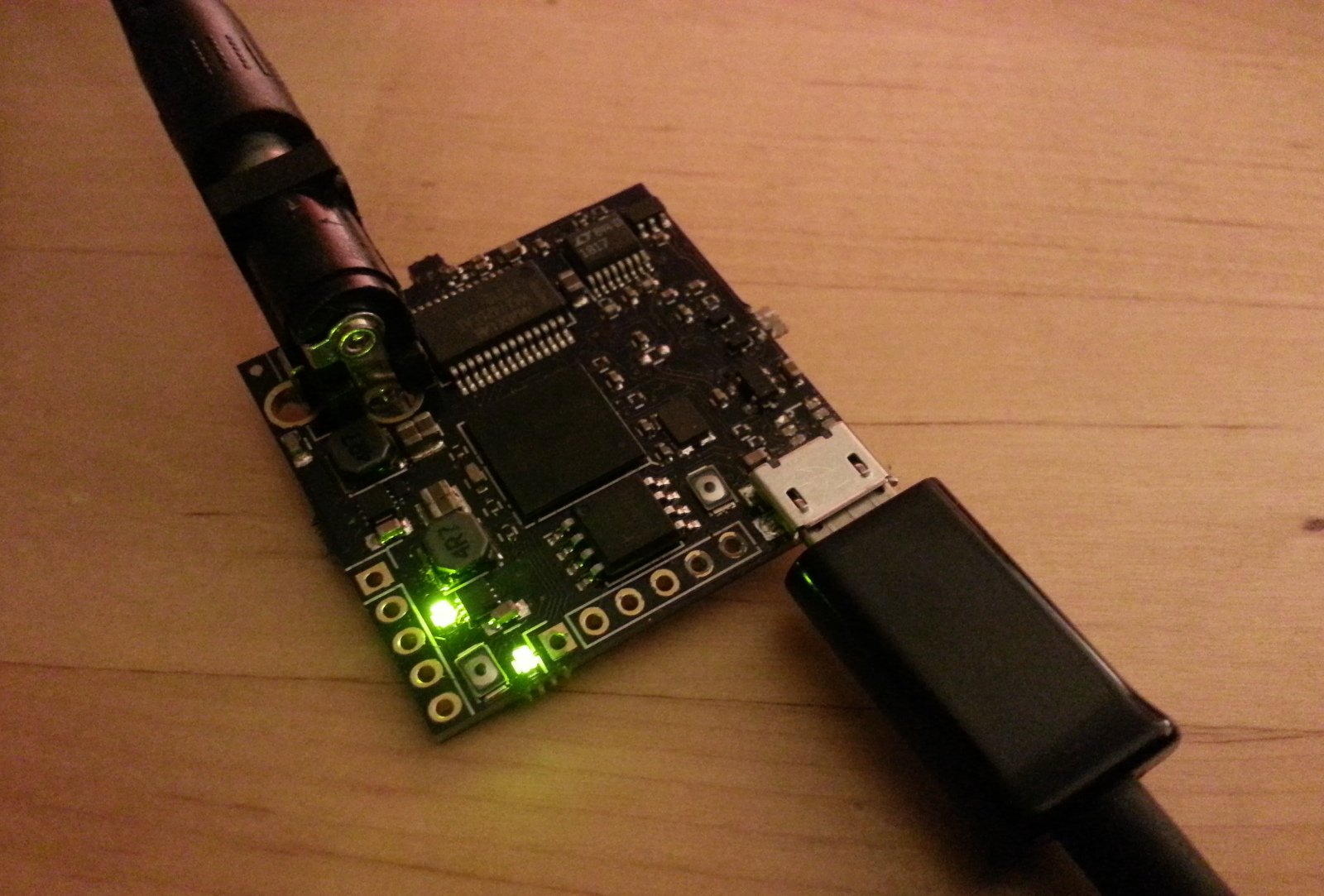
微控制器工作。其他LED由微控制器控制。
双板设计的优点是分部分测试。如果电源电路出现错误,将提供过高的电压,至少另一个板将被保存。
焊接射频板
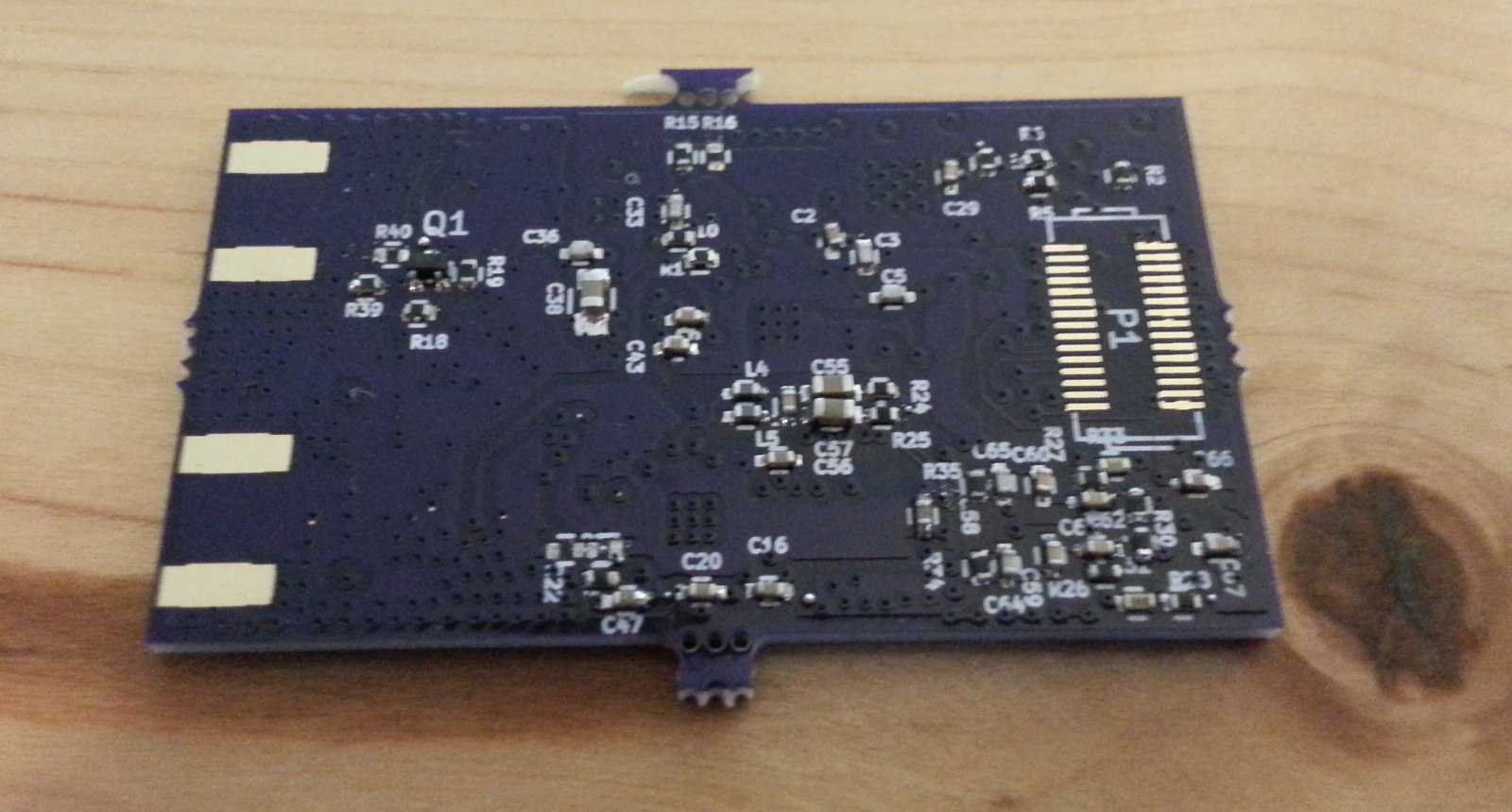
RF板背面。
为了省钱,我没有订购木板底部的模板。只有带可见引线的无源元件易于焊接,无需模板。顶部是所有难以焊接的部件,使用模板焊接要容易得多。
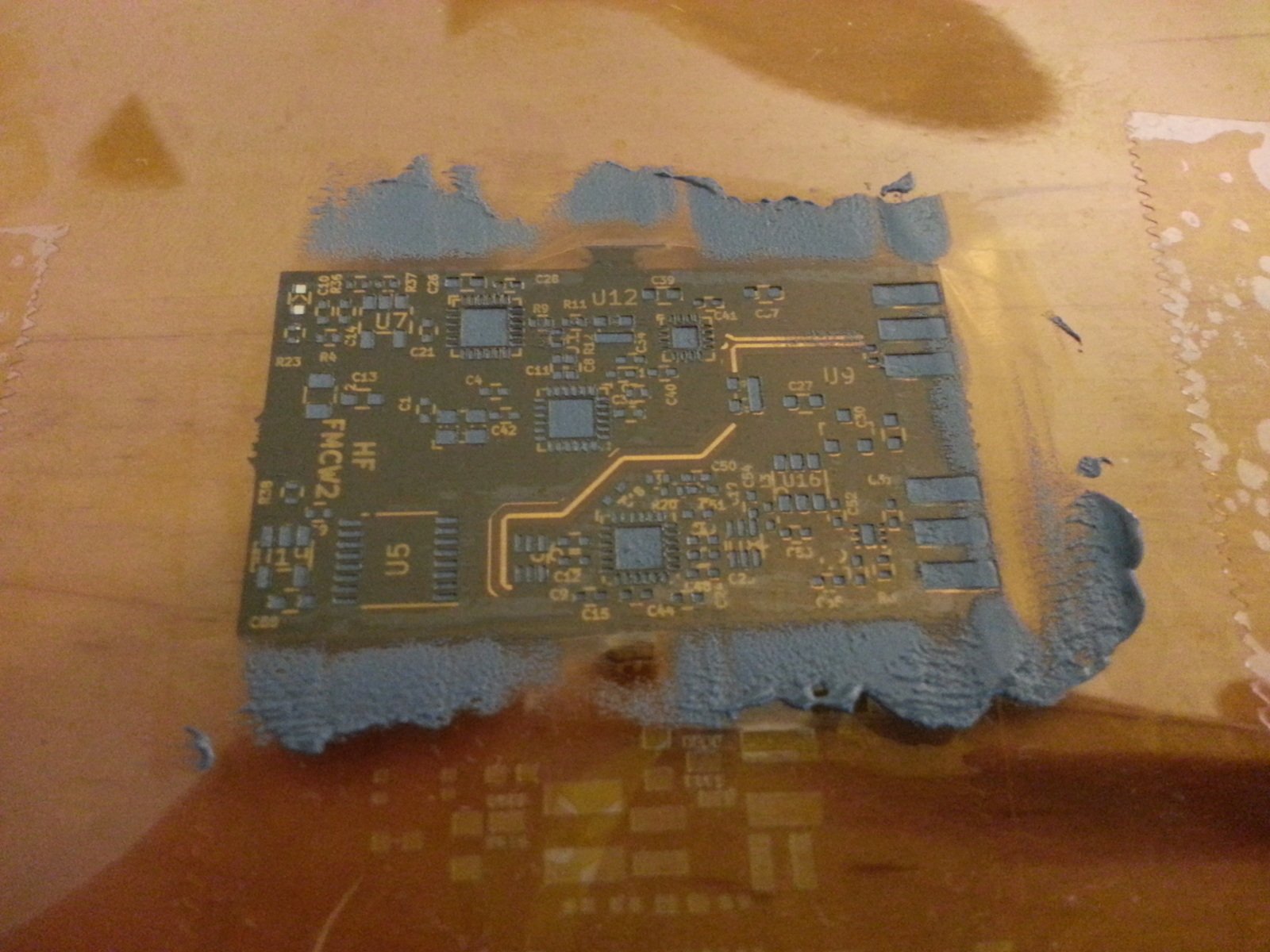
粘贴在射频板上。错过了左上角的一个点。
移除模板后粘贴到射频板上。
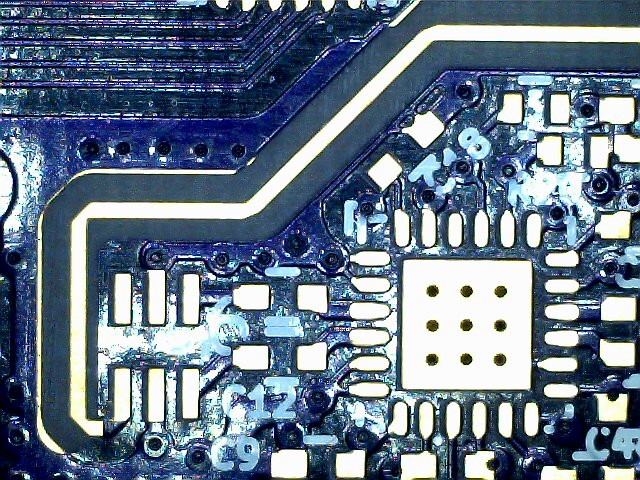
元件焊接。边上的标签是PCB制造过程中留下的,它们可以被折断,但我还没有这样做。
没有阻焊膜的闪亮走线是高频信号的受控阻抗线。阻焊膜会导致一些额外的损耗,并稍微改变线路的阻抗,所以最好去除它,虽然影响不是很大。
上次这些痕迹很粗糙,可能对匹配有一些影响。这一次,迹线的边缘被蚀刻得非常平滑。
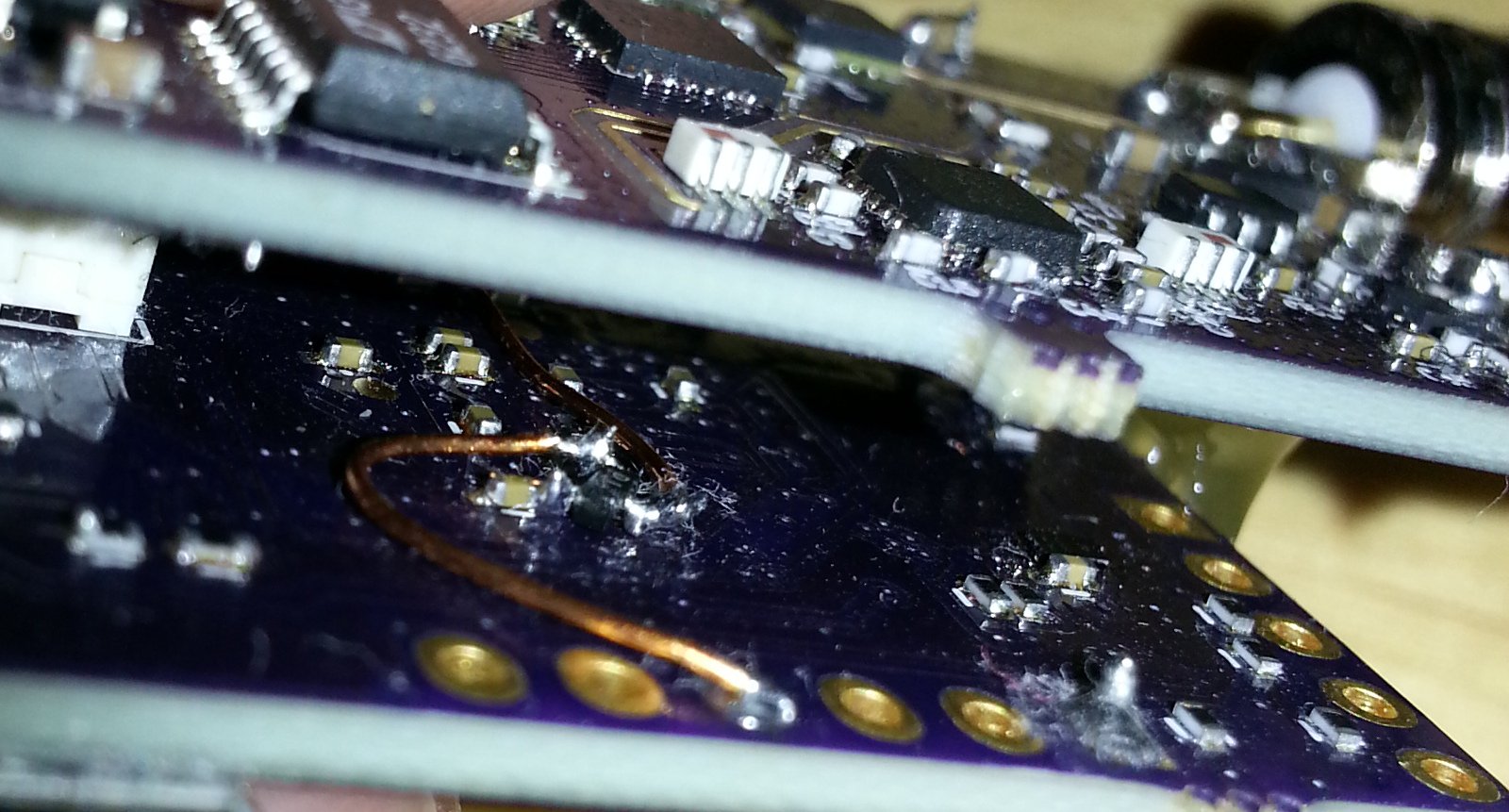
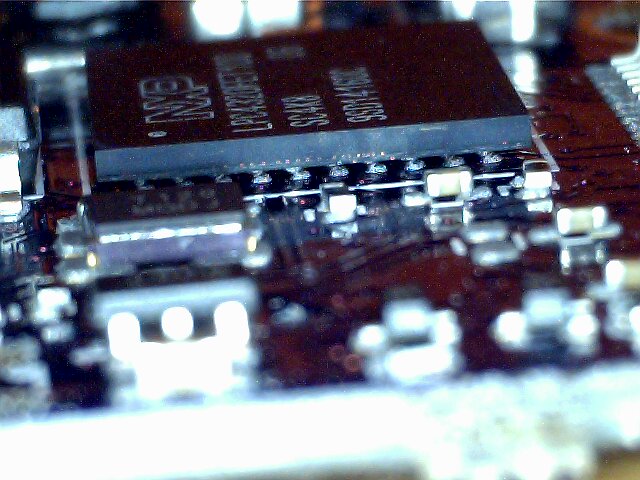
跳线和晶体管。
不知何故,一切都结束了工作,没有任何更大的错误。我犯的一个需要跳线的小错误是将PLL的斜坡完成脉冲连接到微控制器的一般输入。我想我可以在pin上设置一个pin改变中断,但这最终不起作用。SGPIO缓冲来自ADC的样本,因此不可能从中断中知道斜坡完成的确切样本。我还必须将斜坡完成信号连接到SGPIO输入,并对ADC的每个样本进行采样。
这需要增加一个晶体管来延长脉冲,因为输入不再是边沿触发的。引脚连接到晶体管的漏极,集成源电流上拉电阻和电路板寄生电容,减缓信号。幸运的是,我在一个未使用的SGPIO输入端添加了一个测试焊盘,否则由于BGA封装,修复它是不可能的。
上图中还可以看到一团热胶将两块板粘在一起。安装孔将花费至少10€以上的印刷电路板成本,所以我决定把他们排除在外。
距离测量

足球场的图像。
测量雷达范围的简单方法是让雷达指向空白区域,然后在它的视野范围内来回走动。从雷达数据中,很容易看出信噪比是如何随着到雷达距离的增加而变化的。
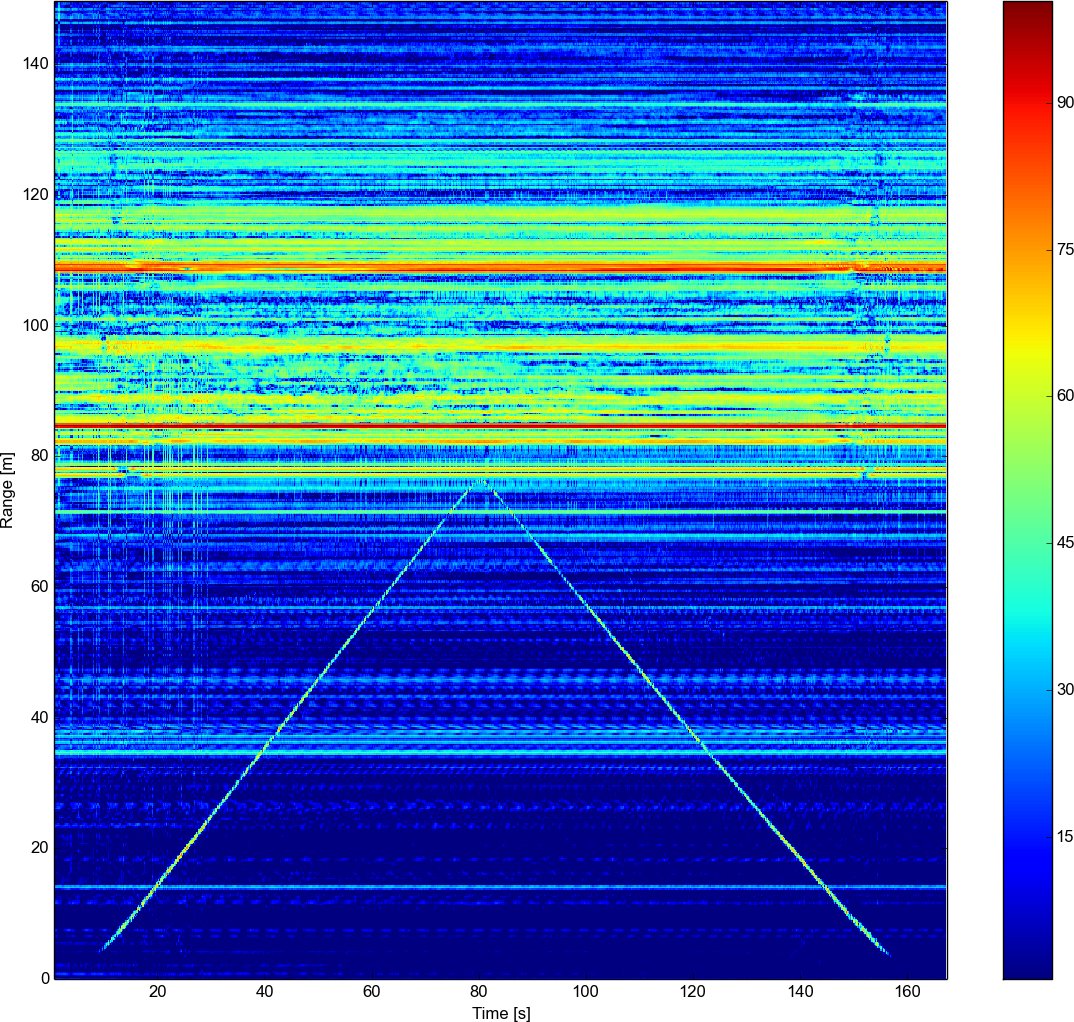
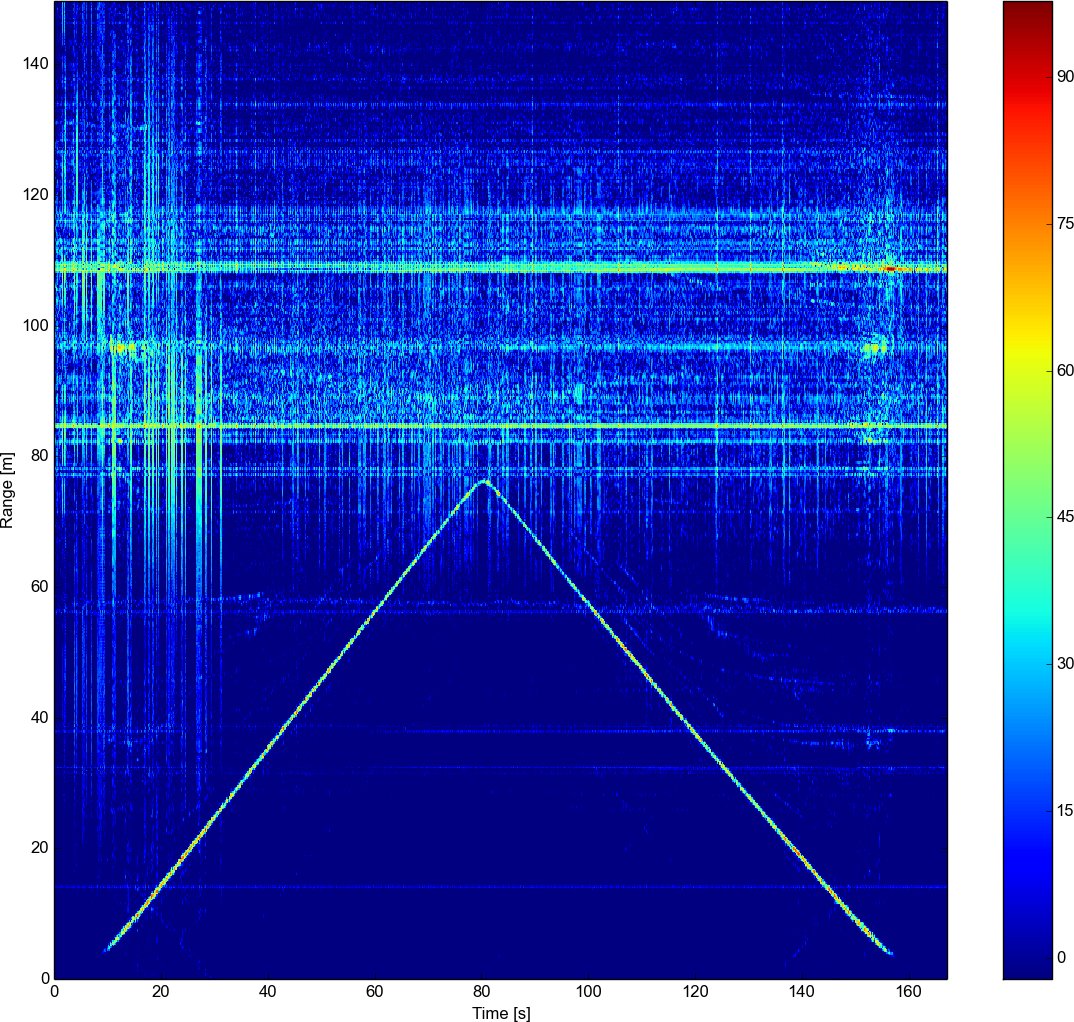
我走在足球场上的时间范围图。带宽为700 MHz。
上面是我在足球场上来回走动的时间范围图。35米左右的线条是足球球门的倒影。80米以外是栅栏、灌木丛和建筑物,它们的雷达截面很大。
对于天线,我使用相同的喇叭天线我向先前的雷达走去。
与…相比相同的测试从以前的雷达信噪比和距离分辨率要好得多。更大的带宽和更线性的扫描提高了距离分辨率。带宽的增加也提高了信噪比,因为每个距离单元的杂波更少。更灵敏的接收器对信噪比有很大影响,并且由于距离补偿,近目标和远目标同时可见。
通过从下一次扫描中减去前一次扫描来减少混乱。
从时域中的当前扫描中减去先前的扫描应该移除所有静态目标,因为它们应该产生完全相同的回报。小目标被移除,但一些最大的目标只是被部分移除。
当我靠近天线时,我遮蔽了背景,这改变了它的反射,并不会导致完全完美的减法。
风可以使树叶移动一点点,甚至一毫米的移动都会改变信号的相位,不会导致完全相减。这就是为什么我的轨迹是可见的,即使我在扫描之间的移动只有大约一厘米。
PLL参考时钟和ADC采样时钟之间的时钟漂移也会导致减法不完全完美。PLL参考和ADC时钟是独立的,但为了获得最佳精度,应该从同一个源获得。它们之间的微小漂移会导致基带信号的相位略有变化,因此减法并不完美。
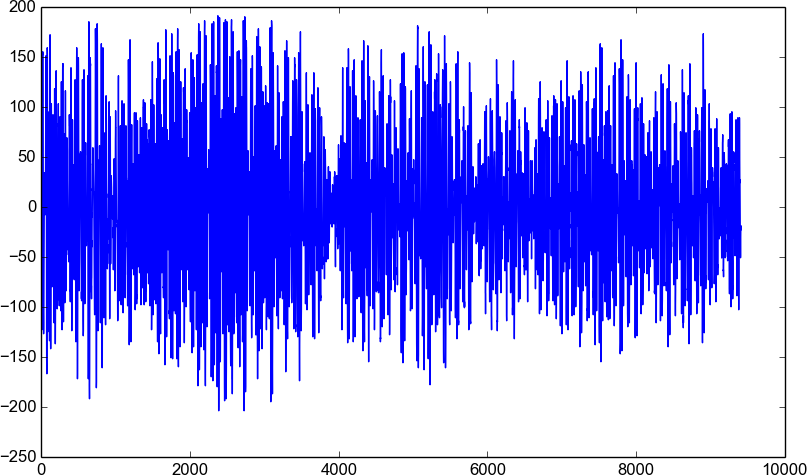
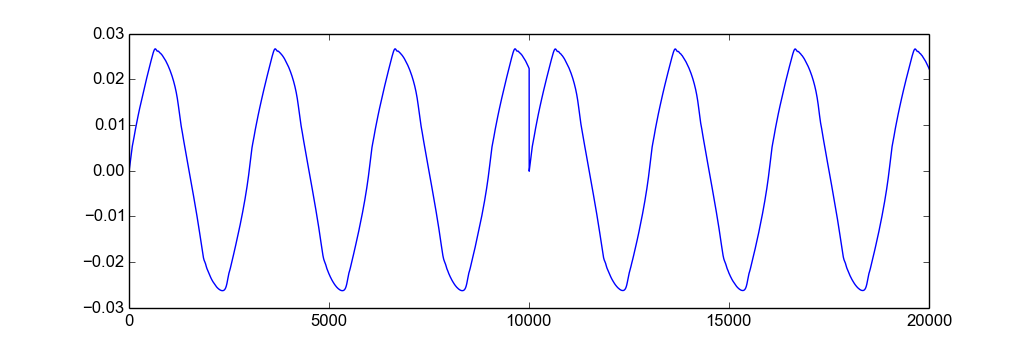
基带信号的时间图。y轴是原始ADC值。
以上是来自ADC的原始基带信号。由于高通滤波器,来自远处目标的高频回波和来自近处目标的低频回波具有大致相同的幅度。
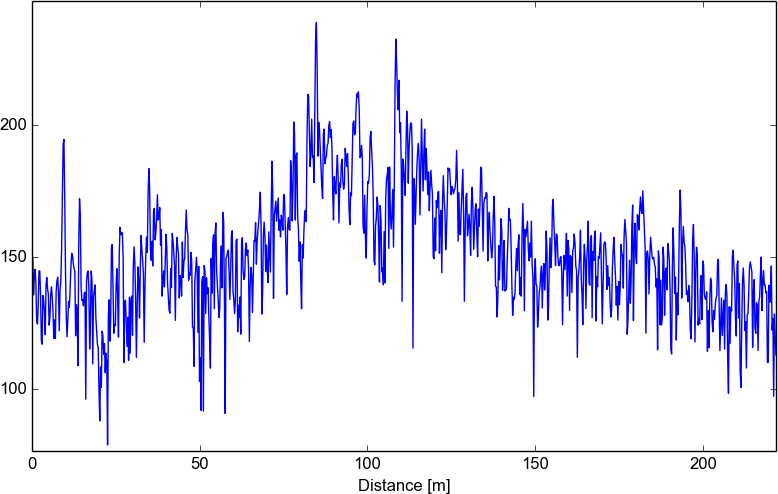
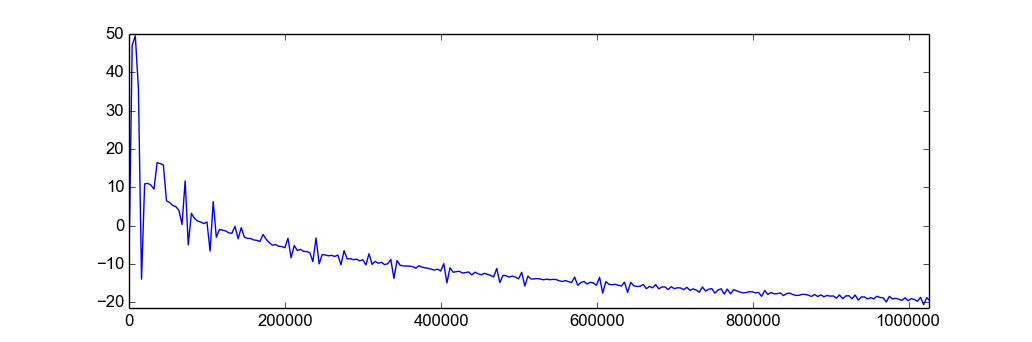
傅里叶变换得到距离。
对ADC输出进行傅里叶变换即可得出距离。这是从开始和9 m左右的反思是我的。信噪比约为60分贝。
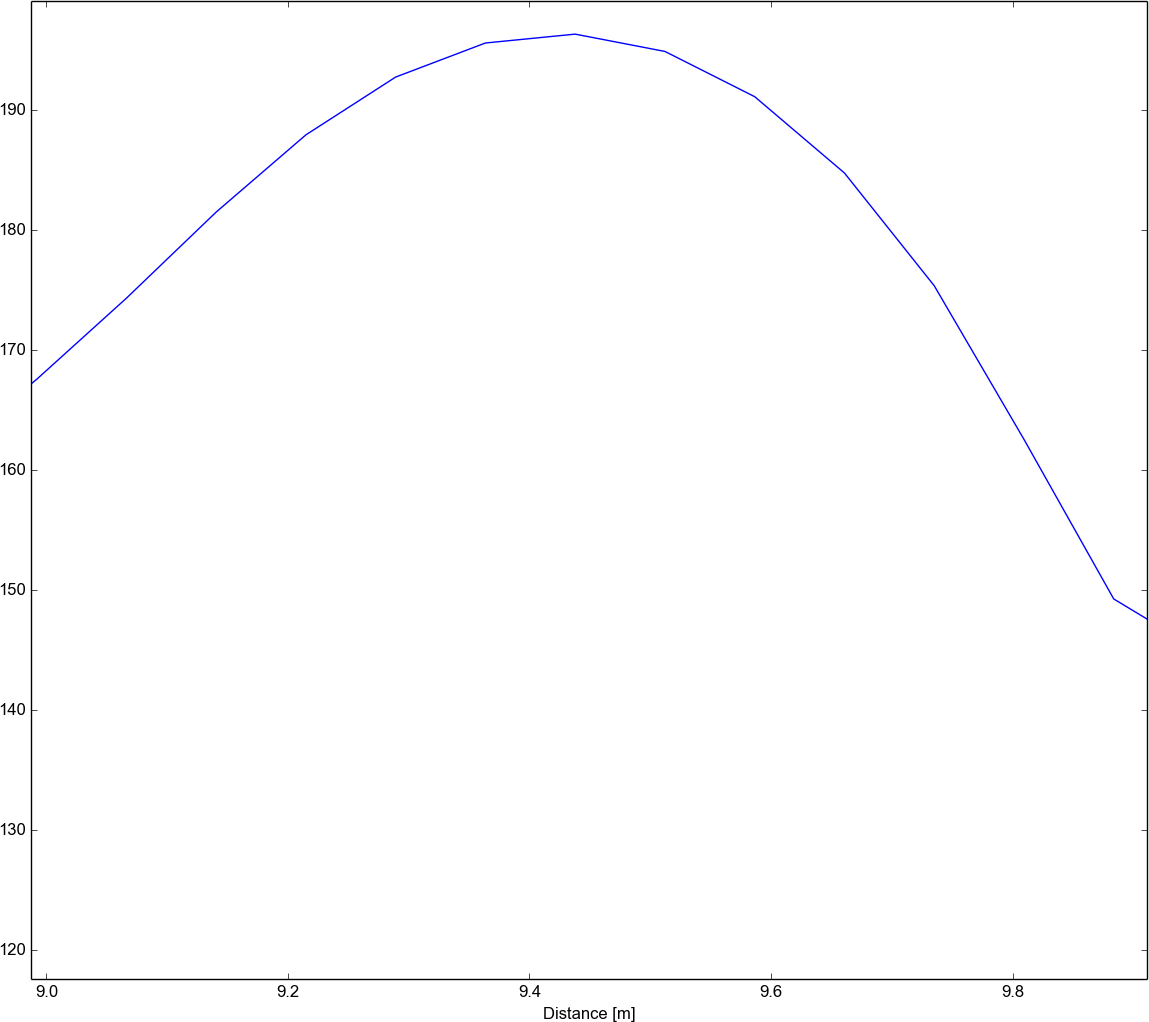
放大9 m左右。
雷达的分辨率取决于其带宽,带宽越高,分辨率越高。应当注意,分辨率仅意味着能够将附近的目标检测为单独的。距离的精度只取决于雷达时钟的精度。用零填充信号使FFT平滑,并允许以更高的精度定位峰值。放大9米的峰顶显示,我当时的位置大约是9.43米。不幸的是,我没有办法以所需的精度验证这一点。
合成孔径雷达
除了测量距离,雷达还可以用来生成场景的二维图像。这可以通过测量几个距离轮廓来实现,同时雷达在直线上移动,天线从行进方向侧向看。如果天线辐射方向图非常窄,可以叠加距离像来生成场景图像。这种方法的问题是关于窄波束宽度的假设通常不能实现。我使用的天线波束宽度约为40度,雷达移动方向(横向或方位)的分辨率非常糟糕。
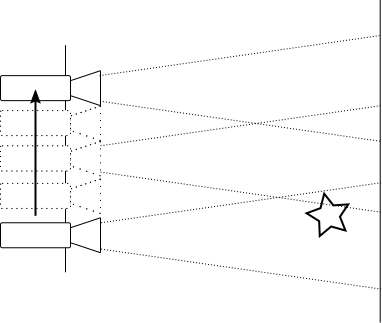
SAR系统图。当雷达沿线移动时,天线内的目标辐射图会发生变化。
合成孔径雷达是一种从相同的距离像测量中获得更好的横向分辨率的信号处理方法。它使用沿线的许多距离像测量来合成天线,该天线与线雷达移入的天线一样长。天线的波束宽度与其物理尺寸有关,非常长的合成天线具有非常小的波束宽度,从而提供大得多的横向分辨率。
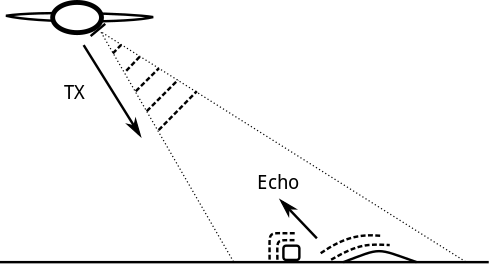
机载SAR系统图。
典型的SAR成像系统安装在飞机或卫星上,这样它可以从一个角度观察大面积的地面。雷达向地面发射脉冲,地面将脉冲反射回来,并给出与成像场景的距离信息。
为了获得来自地面的反射并避免来自大型结构的阴影,雷达天线需要成角度安装。如果角度太大,天线直接指向地面,则距离分辨率很差,因为所有反射都来自几乎相同的距离。如果角度较低且天线指向地面,则建筑物和山丘等高大结构会将其他物体隐藏在后面,而地面等平坦物体不会将信号反射回雷达,因为反射角度太浅。
不幸的是,我没有备用飞机,所以我把天线安装在自行车上,指向零度角。这意味着只有像灯柱、建筑墙壁和树木这样的高大垂直结构才会反射信号,图像看起来就像成像区域的横截面。

安装在自行车上用于SAR成像的雷达。天线开始有点生锈了。
为了正确聚焦SAR图像,平台(自行车)需要匀速直线运动,如果地面平坦,即使在自行车上也相对容易做到这一点。天线也应该指向相同的方向。倾斜自行车将导致它指向地面或天空,并改变雷达回波。几度的倾斜应该不会对图像造成太大影响,因为天线波束宽度很大。
难的是路径需要非常直,因为返回信号的相位用于聚焦图像。当雷达移动载波频率的一半波长时,基带雷达信号的相位会环绕。在这种情况下,载波频率约为5.5 GHz,波长为5.5 cm。为了正确聚焦,路径线性误差应小于波长的十分之一左右,仅为5 mm。在这条直线上移动几米是非常具有挑战性的,并且在移动中会出现一定量的散焦。
图像的横向尺寸取决于平台移动的长度,但是移动的距离越大也意味着运动误差越大,这增加了图像的散焦。合适的SAR成像系统使用GPS和非常精确且昂贵的惯性测量单元来测量平台的实际运动,并在聚焦图像时将其考虑在内。手机GPS没有足够高的分辨率,我也没有惯性测量单元,所以我只需要尽力保持恒定的速度和直线路径。
我决定尝试拍摄附近足球场的SAR图像,之前我在那里测试了雷达。紧挨着它的是铺好的道路,非常平坦,最大限度地减少了运动误差。
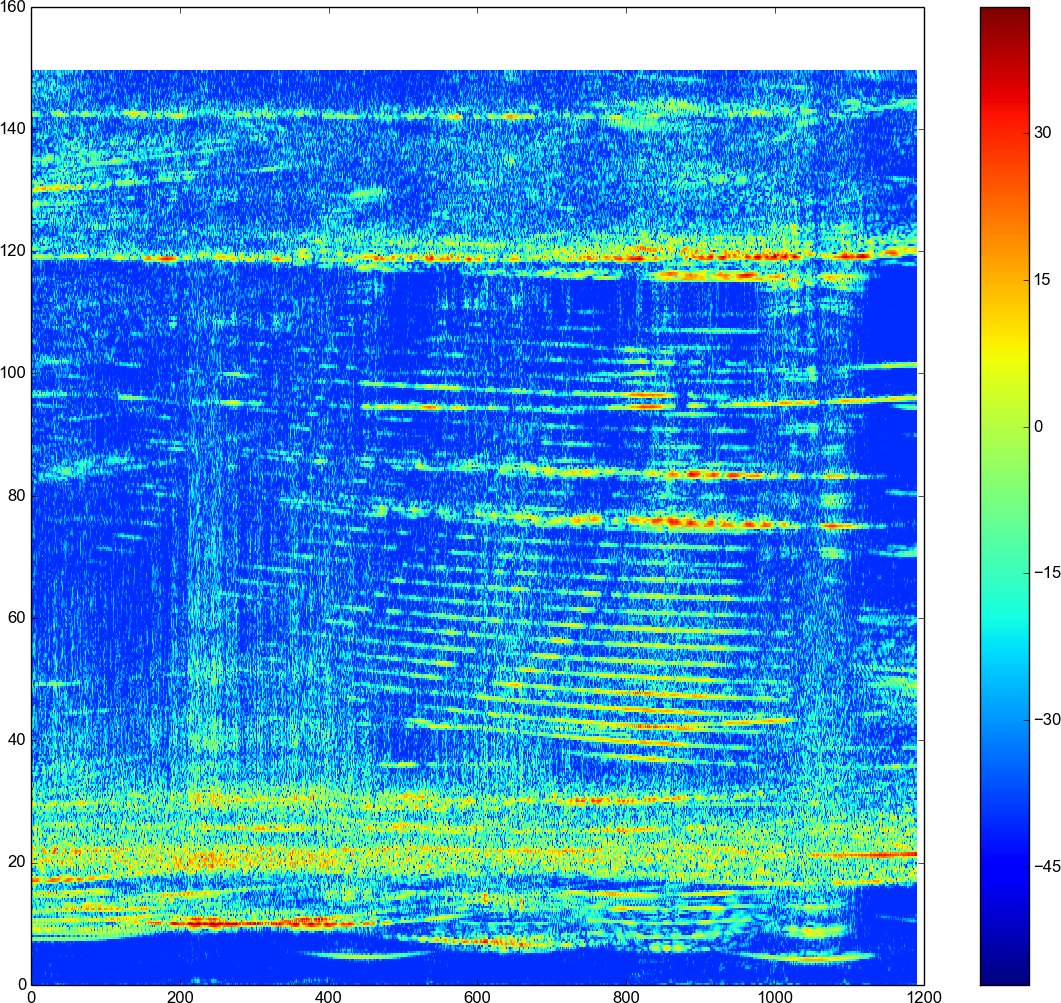
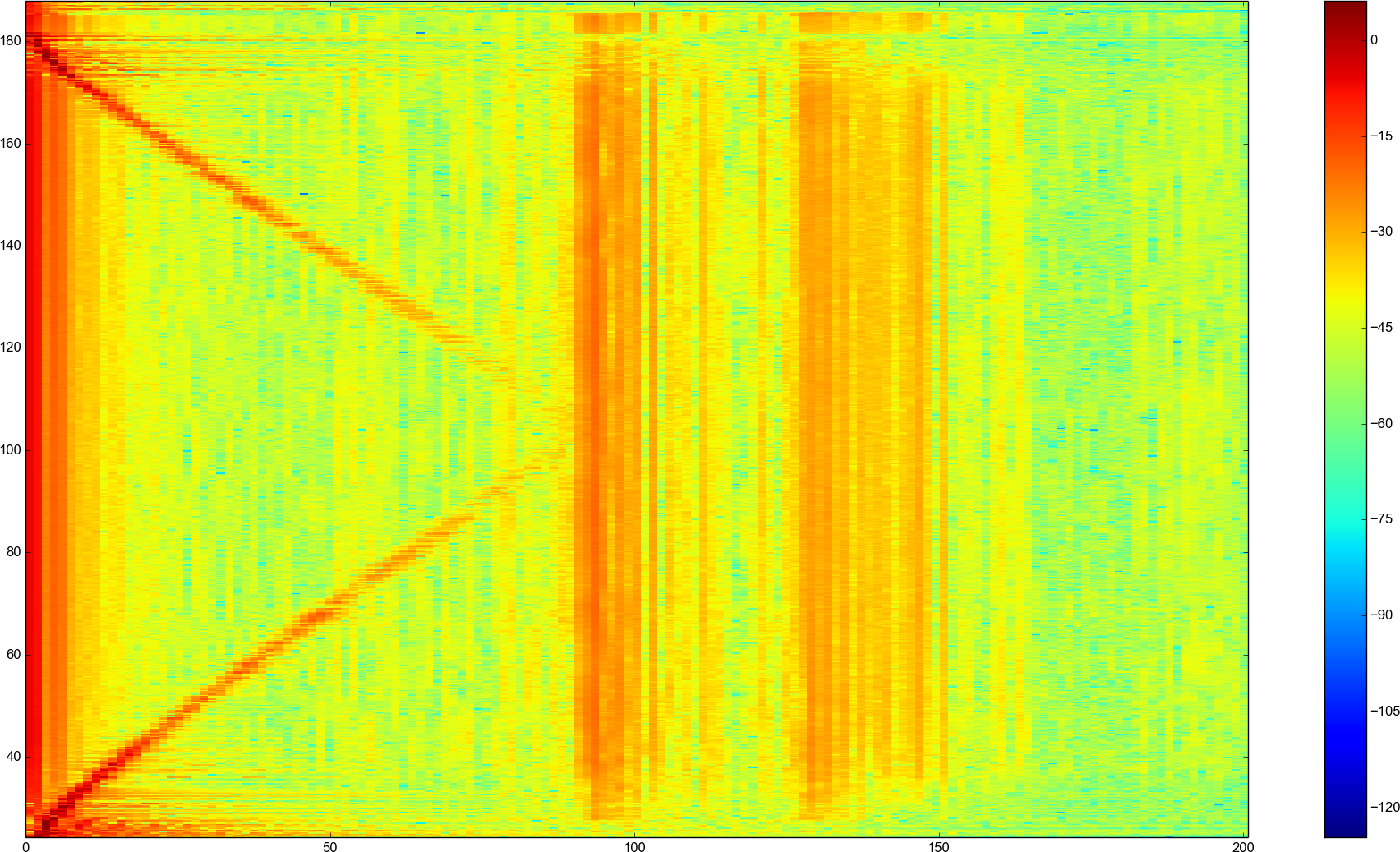
上面是SAR聚焦前雷达的原始距离数据。正如所预料的那样,仅仅叠加距离像的方法不会产生分辨率很高的图像。格式与以前的固定距离-时间图相同,但现在雷达在移动。y轴是以米为单位的范围,X轴是样本。扫描时间为2毫秒,轨迹长约30米,自行车速度约为1.4米/秒。这相当于每2.8毫米扫描一次,对于信号处理,可以假设雷达在扫描时是静止的。这就是所谓的走走停停近似,它简化了信号处理。只有每十次扫描用于图像聚焦。
SAR聚焦算法是一个你可以写一本书的大主题。简而言之,有几种算法用于聚焦为不同成像几何结构设计的SAR图像。我用的是omega-k算法,也叫距离偏移算法。
当雷达沿线路移动时,天线辐射图上的目标在线路上的一段距离内保持可见。因为雷达测量到目标的直接距离,从目标返回的回波由于到目标的距离变化而显示为弧形。由于天线辐射模式较宽,这些弧线在上面的原始数据图像中非常清晰可见,跨越了图像的大部分区域。在进行横向聚焦之前,必须校正这种距离偏移。
Omega-k算法对傅立叶变换的原始数据使用称为Stolt插值的过程来校正距离偏移。结果,来自相同目标的能量排列在相同的距离单元上,并且傅立叶逆变换可以用于聚焦图像。更详细解释和数学推导可以在示例中找到这篇论文[PDF]
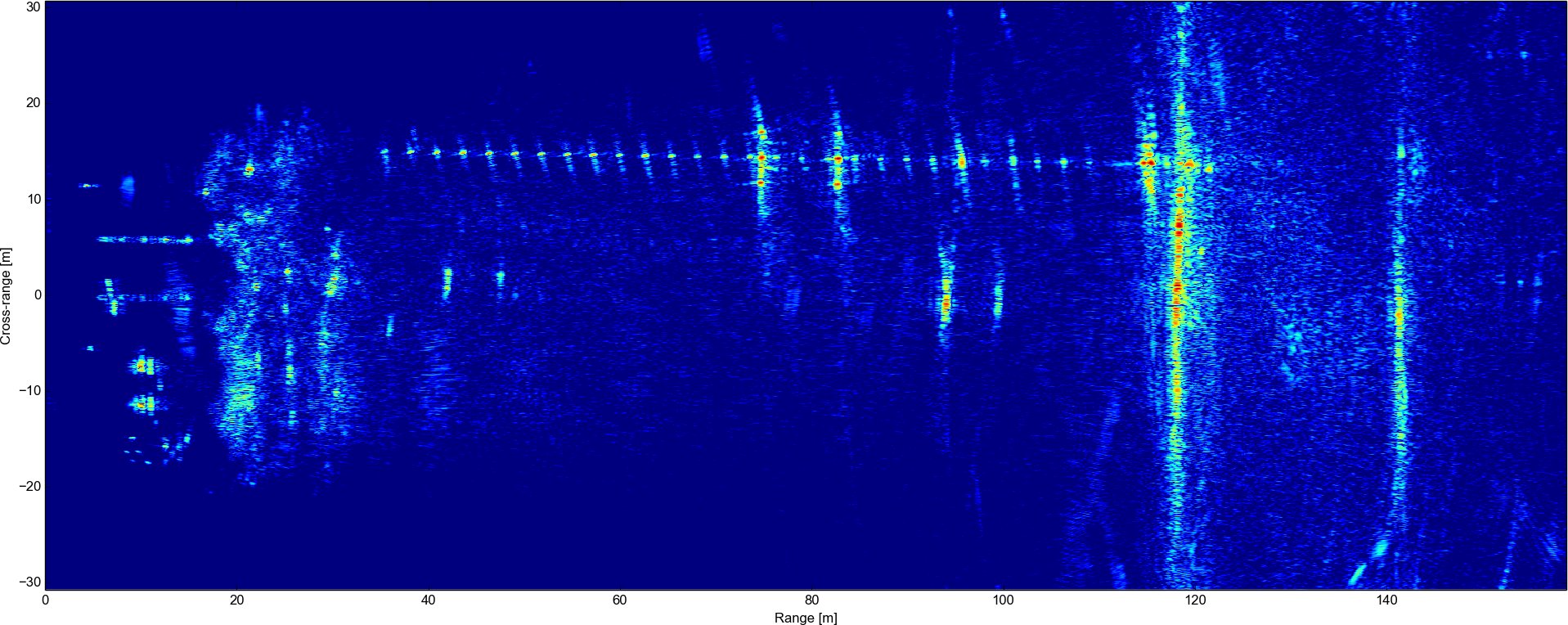
上图是相同原始数据的聚焦合成孔径雷达图像。分辨率大大增加,现在可以看到场景的一些特征。仍然可以看到焦点不足,尤其是在图像中间的栅栏柱上。由于成像过程中的运动误差,每个柱在几米的横向上被涂抹。
上面的相机图片是在+8m的横向范围内拍摄的。相机图像左侧绿色金属栅栏的较大栅栏柱具有较高的雷达截面,在SAR图像中非常清晰可见。自行车架看起来像线条。雷达信号相对容易穿过前景的树木,但120米处场地尽头的金属栅栏反射非常强烈。仍然有一些信号穿过它,并从街对面的建筑物反射回来。
为了更好地聚焦图像,我写了一个最小熵自动聚焦[PDF]程序。当图像聚焦时,它更清晰,熵更低。最小熵自动聚焦算法为每次扫描选择一个最小化图像熵的相移。
自动对焦的图像更清晰。现在栅栏柱有了更好的分辨率,但图像中仍有一些地方没有完全聚焦。
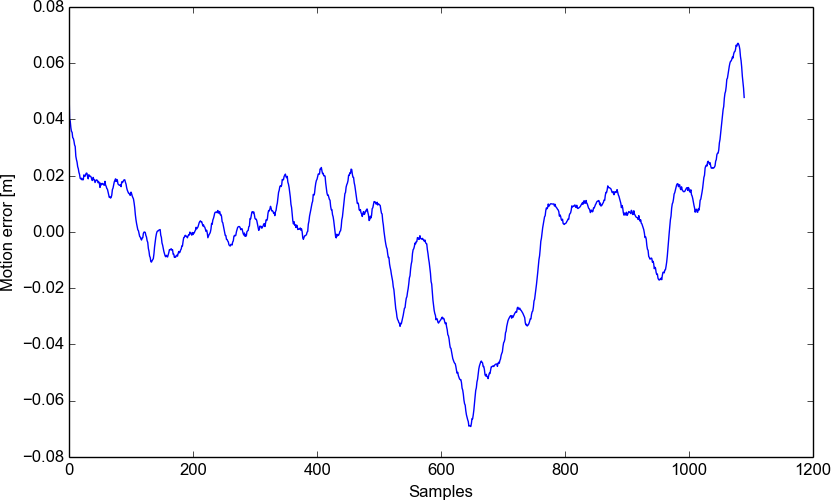
自动对焦的运动误差。
计算出的运动误差只有几厘米。大部分剩余的失焦可能是由自行车的非恒定速度引起的,因为自动聚焦算法只能校正距离方向上的运动误差。
注意,自动聚焦算法没有对相位误差施加任何连续性或其他结构。然而,解决的相位误差在物理上是非常合理的。在扫描之间的几毫秒内,天线不可能移动太多,相邻扫描之间的相位误差差如预期的那样小。我发现令人惊讶的是,使用像图像的熵这样简单的优化目标工作得这么好。
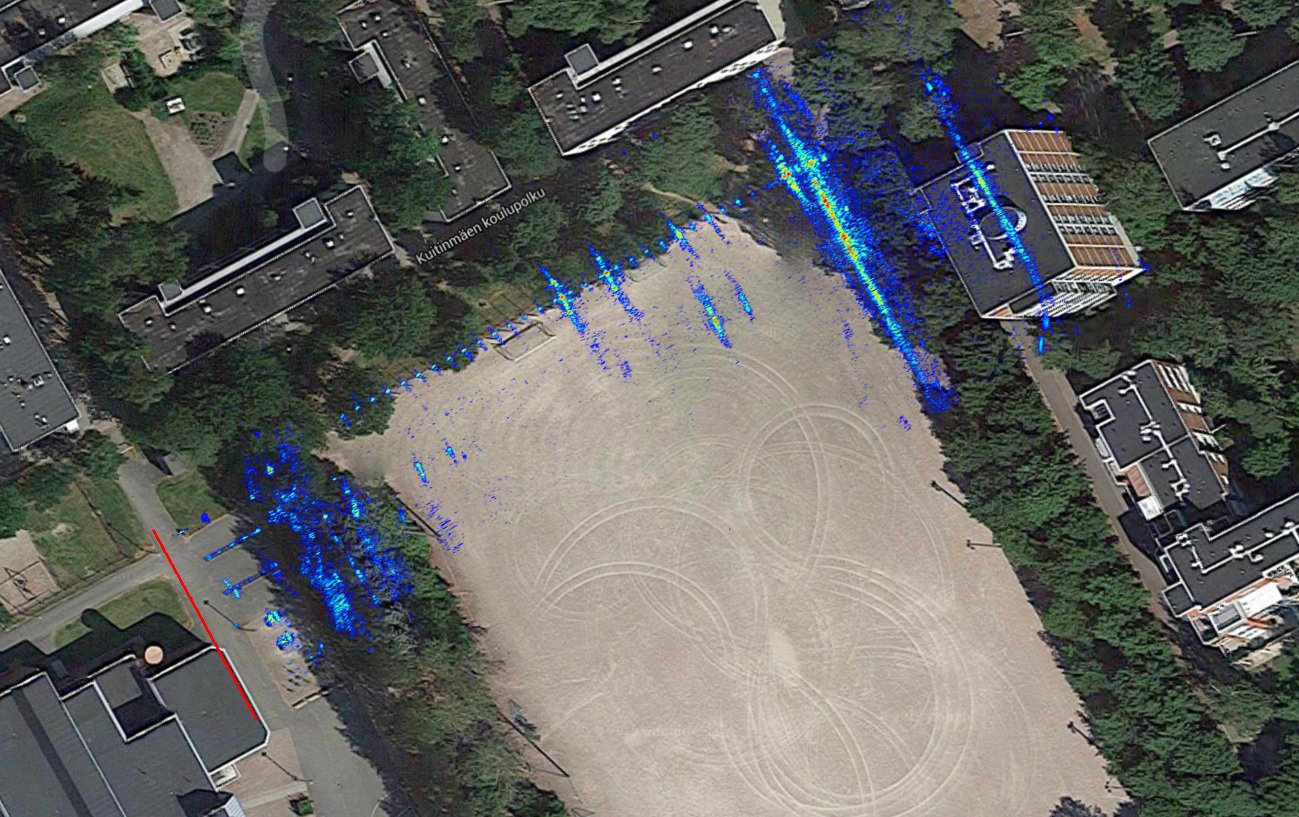
当与谷歌地图上的实地图像重叠时,合成孔径雷达图像与它吻合得很好。自从地图更新后,足球球门移动了一点,但是其他的都在它应该在的地方。
结论
总费用约为200€。多氯联苯是28€,组件是大约120€,电池组是21€从中国和天线是由废金属制成的.
所有硬件设计文件、固件和处理软件均可从以下网址获得开源代码库.


{kind=link}
{kind=link}
{kind=link}